マルチボディダイナミクスモジュールアップデート
COMSOL Multiphysics® バージョン6.4では, マルチボディダイナミクスモジュールを利用のユーザー向けに, ジョイントモデリング機能および複数オブジェクト間の自動接触モデリング機能が追加されました. これらのアップデートの詳細については, 以下をご覧ください.
新しいジョイントインターフェース
さまざまな種類のジョイントで接続された機械アセンブリを解析するための新しい ジョイント インターフェースが導入されました. ヒンジ, スライダー, ボールジョイントなど, 利用可能なジョイントの種類は, マルチボディダイナミクス インターフェースで使用できるものと同様です. この機能追加により, 固体力学, シェル, および 梁 インターフェースにおける接続モデリングがより効率化されます. マルチボディダイナミクス インターフェースの全機能を必要としない場合に特に有用です. この新機能は, チュートリアルモデル ドアスラム解析 で確認できます.
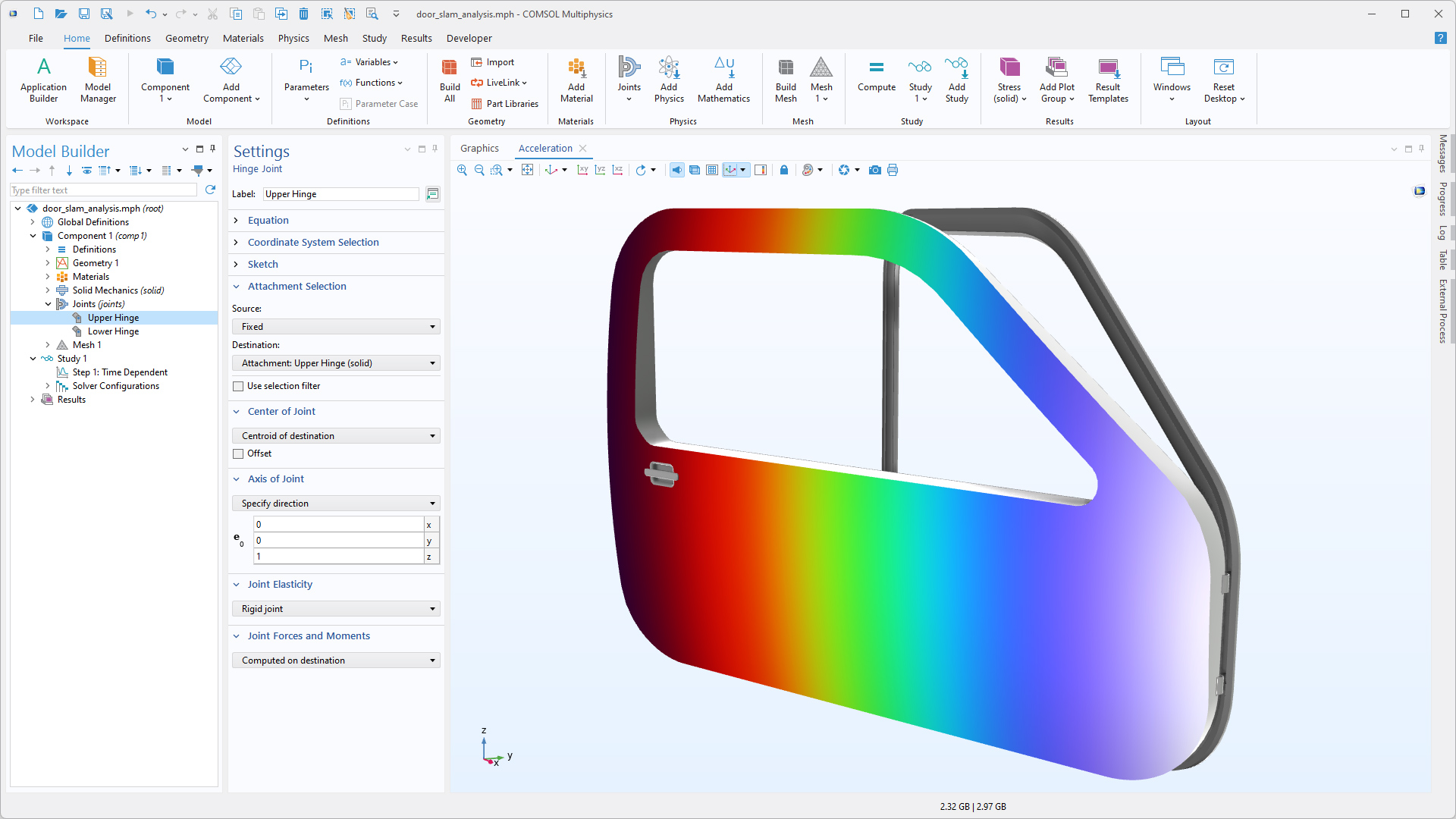
固体力学 インターフェースで作成したモデルに, ヒンジを追加するために使用されているジョイント インターフェース.
多数のオブジェクトに対応した自動接触モデリング
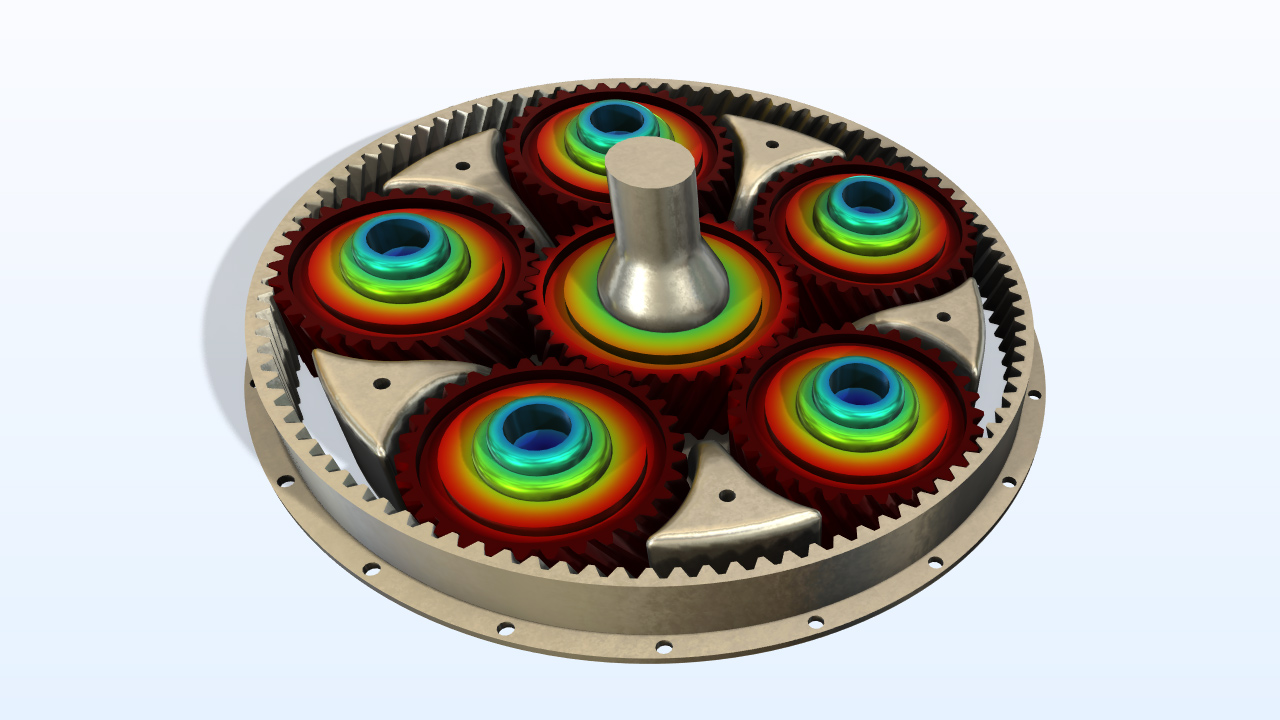
多数の接触相互作用を含むモデルを容易に作成できるように, 新しいタイプの接触モデリング機能が追加されました. この機能では, 多数のオブジェクト間の接触条件を自動的に設定でき, 任意の組み合わせに対応します. この新機能と, 大幅に改善されたワークフローは, チュートリアルモデル 箱の中に落ちる物体 で確認できます.
積み上げられた木製ブロックの塔にボールが当たっている様子. このシミュレーションでは, 56個の物体が相互作用し合う可能性があり, その動きは予測が困難なものとなります.
新しいチュートリアルモデル
COMSOL Multiphysics® バージョン 6.4 では, マルチボディダイナミクスモジュールに2つの新しいチュートリアルモデルが追加されました.