- COMSOL News 2025
- COMSOL News Special Edition: Food Industry
- COMSOL News 2023
- COMSOL News 2022
- COMSOL News 2021
複合材料を使用した軽量ハイパーループポッドの設計
2019年7月, 2年連続でEPFLoopチームがSpaceXハイパーループポッドコンペティションに参加しました. 彼らは, 前年度の半分の重量と2倍の速度のポッドを持って, 今年の大会に戻ってきました. 強化された設計の1つの要因は? 複合材料モデリングです.Rachel Keatley 著
2020 12月
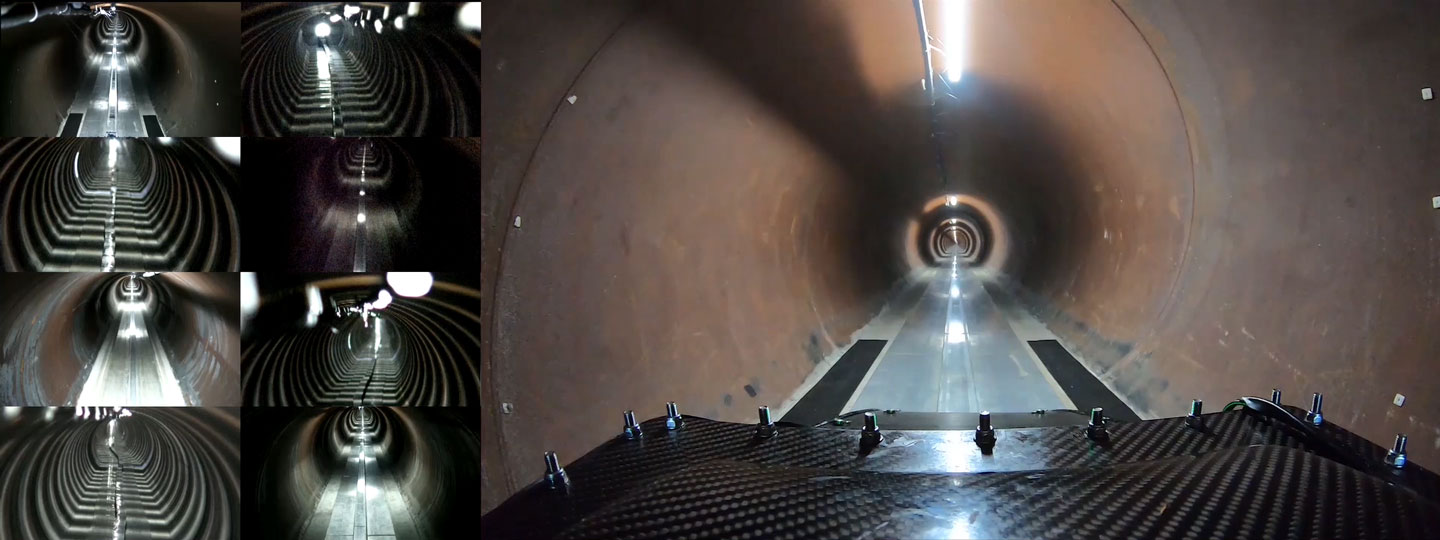
3, 2, 1, GO! なめらかなハイパーループポッドは, 148 mph(~238 km/h)の真空下で1マイルの長さのテストトラックを飛行します. 工学部の学生のチームは, ゼロから, 設計と制作を支援したポッドの実行が完了するのを黙って見守っています.
2012年, 起業家のElon Musk は, 昔から抱いてきたアイデアに基づいて, 非常に高速で未来的な交通手段であるハイパーループの概念を普及させました. このビジョンを実現するために, Elon Musk の航空宇宙企業であるSpaceXは, 現在SpaceX ハイパーループ ポッド コンペティションとして知られているデザインコンペティションを後援すると発表しました. このコンペティションでは, 世界中のエンジニア リングチームがハイパーループのプロトタイプを披露するために招待され, カリフォルニア州ホーソーンのSpaceXテストトラックでデザインをテストできるトップセレクションが用意されています. これまでに4つの大会がありました. 最初の大会は2017年1月に開催されました.
2019 SpaceX ハイパーループ ポッド コンペティションでは, リピーターのEPFLoopがハイパーループポッドの設計を大幅に強化しました. ポッドの最も注目すべき改善点の1つは? 昨年の大会の半分の重さです! ポッドに強化された軽量設計の主な要因は,そのコンパクトな複合ビルドです.
2019 SpaceX ハイパーループコンペティションの1年前
2018年, スイス連邦工科大学ローザンヌ校(EPFL)の工学部の学生と技術顧問で構成され, Mario Paolone教授によって開始されたEPFLoopチームは, 最初のSpaceX ハイパーループ ポッド コンペティションに参加しました. 5000以上のチームが応募し, 実際の大会に招待されたのは20チームだけだったことを考えると, 彼らが3位になったことは大変な偉業です. EPFLoopはこの経験をとても有意義なものだと考えたので, 2019 SpaceX ハイパーループ コンテストへの出場を目指して, もう1年間, 集中的に作業に専念することにしました. ネタバレ注意:彼らは再び招待されました!
2019年のコンテストに参加する際, EPFLoopの目標は, 慣性荷重や振動などの構造荷重をサポートできる軽量のハイパーループ ポッドを設計することでした. 新しいポッドのシャーシ, 圧力容器, エアロシェルはすべて1つのコンパクトな構造に組み込まれています. これらの3つの構造コンポーネントはそれぞれ, 炭素繊維複合材料で構成されています.

2019 EPFLoop チームのテクニカルリーダーであるLorenzo Benedetti博士によると, 複合材料を使用すると,「ポッド構造が特定の形状をとることができ, 全体的な強度とパフォーマンスを向上させるのに非常に有利です」とのことです. EPFLの学生でEPFLoopチームのメンバーであるJérôme Harray氏は,次のように同意しています. Harray氏は, 金属を扱う場合と比較して, 炭素繊維はその層の形状と配置を最適化できるため, 設計プロセス中の自由度を高めることができると述べました. また, カーボンファイバーはまた, 超軽量で丈夫(スチールよりも強く, アルミニウムよりも軽い), 剛性が高いため, ハイパーループ ポッドのプロトタイプを作成するのに最適だとも述べています.
ハイパーループポッドで複合材料を使用することは大胆な動きでしたが, シミュレーションにより, EPFLoopはポッドの構造を効率的に設計し, その製造に集中することができました.
コンペティションに至るまでの数ヶ月
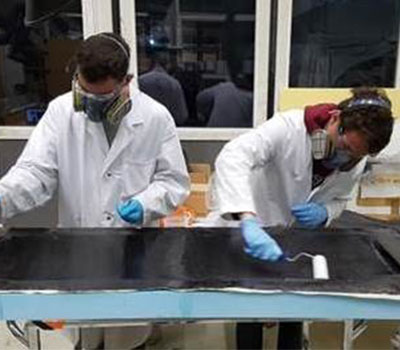
EPFLoopは, ハイパーループポッドのすべての部品をEPFLの高度な複合材料処理研究所(LPAC)の社内で製造しました. ラボでカスタムピースを作成することに加えて, 作成自体が難しいため, チームはポッドの品質を確保する必要がありました. すべての目標を達成し, スケジュールを維持するために, 彼らは, 設計の側面を仮想的にテストするためのシミュレーションに目を向けました.


シミュレーションにより, EPFLoopは, ポッドのすべての部分を設計するときに, 統一されたアプローチを持つことができました. 「何かをテストする必要があるたびに, それを構築する前に, シミュレーションの力を利用して重要な決定を下すことができました」とBenedetti氏は述べています.


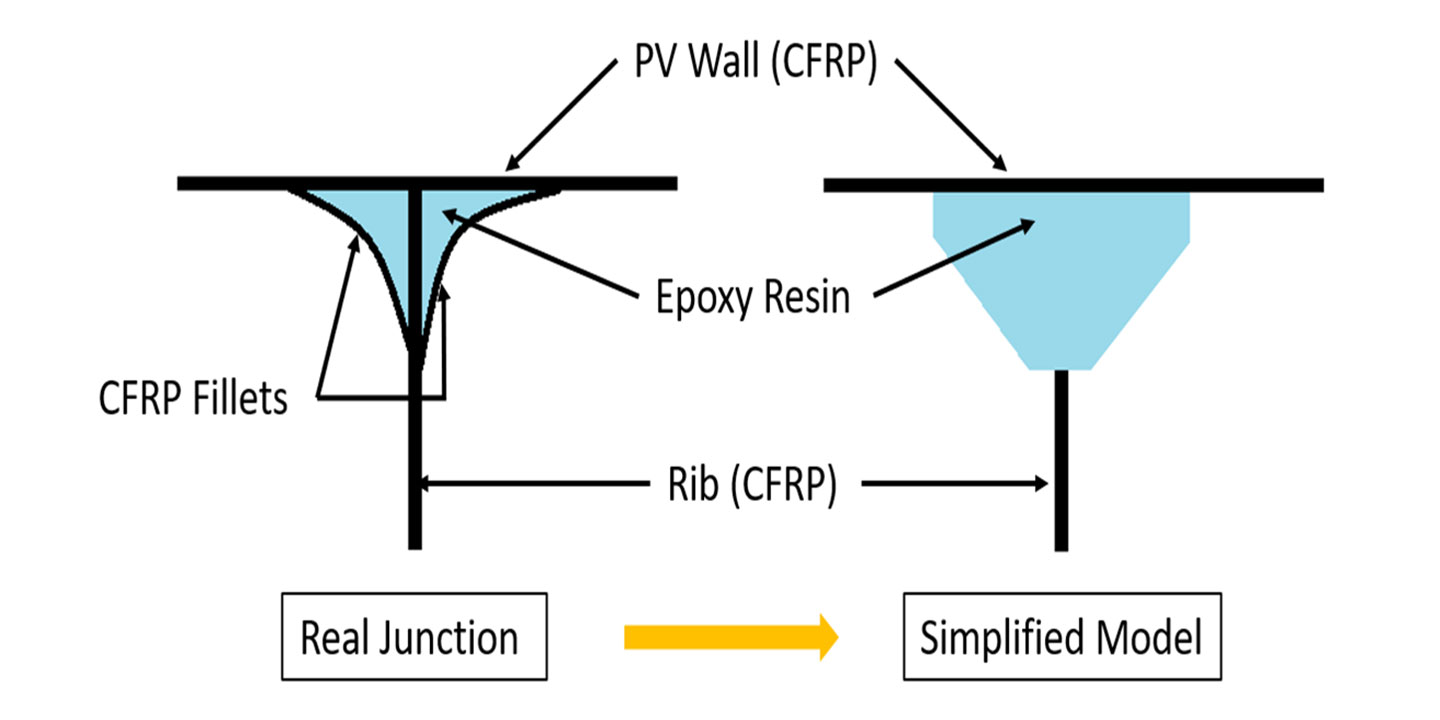
ポッドの構造の大部分が薄い壁で構成されていることを考慮して, チームはこれらのコンポーネントを2D要素として効率的にモデル化できるツールを探しました. その結果, 最初の3Dソリッド ジオメトリモデルの後, COMSOL Multiphysics® ソフトウェアのアドオンであるデザインモジュールを使用して, 炭素繊維パーツがシェルジオメトリに変換されました. チームは, 構造力学モジュールと COMSOL Multiphysics® のアドオン である複合材料モジュールを使用して, 動的負荷の下で, 圧力容器, エアロシェル, シャーシなどのポッドの主要な構造部品の強度を調査しました. 負荷には, 圧力容器の1バール, ブレーキシステムのピーク10 kN, および安定性システムのセットあたり最大1.5kNの振動が含まれていました. さらに, リニアインダクションモーターは, インサートに加速時に2.5-kN の力, 減速時に3.8-kNの力を発生させます. 3つの部品(圧力容器, エアロシェル, およびシャーシ)のそれぞれは, ファイバーエポキシとフォームプライの層を使用してモデル化されました. ポッドのサンドイッチ構造は, 複合材料モジュールの積層シェルインターフェースを介して等価単層理論を使用して分析されました. EPFLoopのモデルの唯一の固体部品は, 構造用エポキシ接着剤で強化されたさまざまな複合パネル間の接続でした.
「このマルチフィジックスモデルが必要だったのは, 接着された2つの部品間の界面で, 接着剤が複雑な応力分布を示し, 重大な障害を引き起こす可能性があるためです」とBenedetti氏は述べています. 「シェルモデルは本質的に, パネル間の直交接続のすべてを捉えることはできませんが,ソリッドモデルは, 選択した設計の限界を解析するための有効な代替手段です.」
SpaceXの安全要件を満たすために, EPFLoopは, 構造全体で2つ, 圧力容器で3つの最小安全率を保証する必要がありました. このため, チームはTsai-Wuの安全基準と, 必要な目標を達成するための主応力の単一の制限を使用しました.
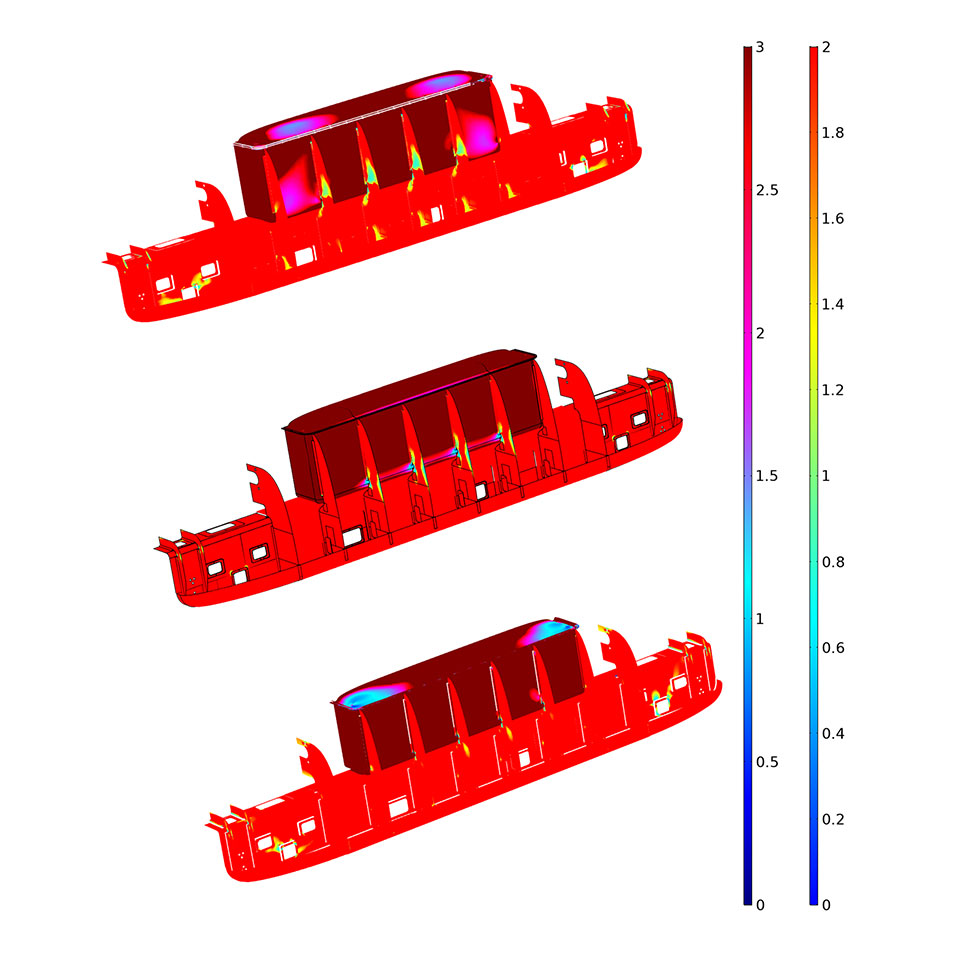
シミュレーションを使用することにより, チームは, 求められる安全率で動的負荷に耐えながら, 可能な限り軽量である最適化されたハイパーループポッドを設計することに成功しました. 2018年のポッド設計と比較すると,「構造物の質量は2分の1になりました」とBenedetti氏は述べています. 新しいポッドの重量は約331ポンド(または約150 kg)ですが, 昨年のポッドの重量は661ポンド(または約300 kg)を超えていました. シミュレーションは, チームが軽量設計が軌道上でうまく機能することを保証するのに役立ちました.「9か月の期間では, 実際にすべてを実験的にテストすることはできません. ある時点で, 結果を確認する必要があります. 多くの良い結果が得られ, それらを確認することができました.」とBenedetti氏は述べています.
コンテストの週
2019年の大会のためにハイパーループ ポッドをカリフォルニアに出荷する前夜, EPFLoopチームはある問題に気づきました. 「ポッドをテストしていて, ある時点で, 機能しなくなっていました」とBenedetti氏は述べています.犯人は?ポッドの推進システムでした.
彼らのポッドは,リニアインダクションモーター(LIM)による, 革新的な推進システムで構成されていました. このシステムは, ポッド内に強力な磁場を生成し, 加速に重要な機能であるアルミニウムレールからポッドをはじくことができました. さらに, ポッド全体の重量を減らすこともできました. ただし, この種のシステムにはかなりの難しい要件が伴います. たとえば, それは狭い間隔のコイルを流れる多くの電流を必要とし, システムの各コンポーネントは, 電流の漏れや短絡を避けるために適切に絶縁する必要があります.
チームはポッド全体を切断し, ケーブルの緩みを発見しました. これがモーターの短絡の原因でした. 眠れない夜を過ごした後, 彼らは問題を解決することができ, ポッドを出荷する準備が整いました. 「これは, 競技会でのテスト自体よりもエキサイティングなことでした. その時点で, 機能していて信頼できるものがあることがわかっていたからです」とBenedetti氏は語った.その夜,EPFLoopチームの全員が重要な教訓を直接体験しました.「現場に出て解決策を見つけなければならない場合は, オープンマインドとその場で問題を解決する能力を持つことが重要です.」
実際の競技会は7月に1週間行われ, 日曜日に始まり, 日曜日に終わりました. その後, 競合他社のすべての技術文書が評価され, ポッドが一連のテストにかけられます. 「私たちは競争の準備ができていたので, 水曜日までにほとんどのテストをすでに終えていた」とBenedetti氏は語ります.
決勝レースの日
素晴らしいことに, EPFLoopは2年連続で4つのトップスコアチームにのみ開かれている最終レースに到達しました. ベルナーアルプスの山にちなんで名付けられた彼らのポッド, Bella Luiは, レースの準備ができていました.
決勝レース当日, チームは一斉にトラックに向かい, Bella Luiを応援する準備をしました. しかし, チームメンバーのNicolò Riva氏にとって, 決勝レースの日はまったく別の経験をしていました. Riva氏はドイツにいて博士号取得に向けて取り組んでいたため, 携帯電話からレースをライブストリーミングしました. 「彼らが走ったその瞬間を覚えている」とRiva氏は言います. 彼は誇りを持ってプロジェクトに参加していたので, とても辛かったが, 直接レースに参加することはできなかった. Riva氏はプロジェクトにリモートで取り組んでいましたが,それでもEPFLoopチームの不可欠な存在でした.

EPFLoopために, ハードワークと眠れぬ夜の9ヶ月間を費やし, 彼らは,ついに, その4ワードに行き着きました! 3, 2, 1, ゴー!そして, 彼らのポッドはオフになりました.「私たちは, 昨年から一変したプロトタイプで臨んだので, 我々は大変な偉業である第三位を獲得することができた.」Benedetti氏は語りました. レース中, 軽量の複合ポッドは最高速度148 mph(~238 km / h)に達しました. これは, 最高速度52 mph(~84 km / h)に達した2018ポッドの速度のほぼ3倍です. 記録的な速度で走行している間, 2019 ポッドは7 gのピーク減速で1秒未満で安全にブレーキをかける(または停止する)ことができました. これは急速な加速と同じくらい重要な機能です.
このプロジェクトのおかげで, EPFLoop チームの学生は, 革新的なものを設計し, 最初からプロトタイプを作成し, マルチフィジックス シミュレーションの助けを借りて問題を解決する方法を学びました.