このブログでは COMSOL Multiphysics® ソフトウェアとAC/DCモジュールでモデル化された12スロット, 10極の永久磁石(PM)機械について説明します. この例で使用する機械は, 回転装置の代表的な例であり, 外径35 mm, 軸方向長さ80mmです. 入力条件を少し変更するだけで, 同じモデルをモーターまたは発電機に変えることができます. 今後のブログで, ここで説明する設計の各側面について詳しく説明します.
これは, COMSOL Multiphysics® ソフトウェアのモデリングおよび処理機能を使用して, 回転機械のいくつかの設計面に関する洞察を得る方法を説明するシリーズの最初のブログです.
電気モーターと発電機の設計:モデル設定
永久磁石モーターでは, ステーターからの磁場は, ステーター電流によって生成される磁場と同期して回転します. ローターとステーターの磁場の相互作用により正味のトルクが生成され, モーターが巻線の電流を機械的動力に変換できるようになります. 励起の同期性の結果として, 永久磁石モーターでは, 位置がステーター電流と同期しているため, 瞬間トルクはローターの角位置に強く影響されます. これは, ステーター巻線がローターとステーターの間の速度の遅れの関数としてローター磁界を誘導する非同期機(したがって, 通称として誘導機と呼ばれるようになった)では異なります.
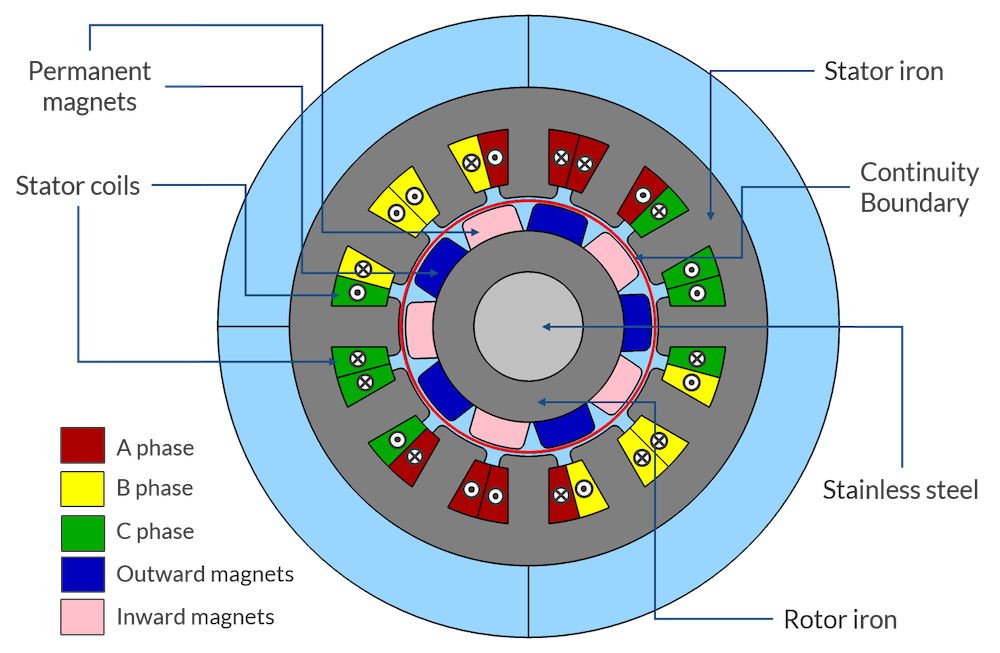
永久磁石機モデルの概略図.
コイルの励起は, 次の形式になります: I = I_m cos(\kappa \alpha + \phi). ここで,I_mはピーク電流, \kappaは極数に依存するスケーリング係数, \alphaはローター角度, \phiは位相角です. この例では, 3つの相の励起は,それぞれ次式で与えられます: I_a = I_m cos(\kappa \alpha),I_b = I_m cos(\kappa \alpha – {120}^{\circ}),I_c = I_m cos(\kappa \alpha – {240}^{\circ})
ステーターとローターの極の間の引力と反発力が一方向のトルクを生成することを保証するために, スケーリング因子\kappaは, ローターが1つのローター磁石の角度範囲で移動するときにステーターコイルからの磁場が逆方向になるようにする必要があります(磁石は交互の極性を持ちます).その値は\kappa = \frac{{180}^{\circ}}{{360}^{\circ}/N_p}で与えられます.ここで,N_pはローターの極の数です. 分母は,単一のローター極の角度範囲を示します.
磁場分布の解析と最適化
磁場分布は, 電気機械の設計において非常に重要な要素です. 同期回転機では, 誘導電圧を解析するための重要なパラメーターは, エアギャップ磁束(ローターとステーターの間で交換される磁束)の空間分布です. ステーター相電圧は, 半径方向の磁束がローターの周囲に沿って正弦波分布を持っている場合にのみ正弦波になります. この空間波形は, エアギャップ起磁力(MMF)波とも呼ばれます. MMF波が非正弦波の場合, 誘導電圧に高次の高調波が導入されます.
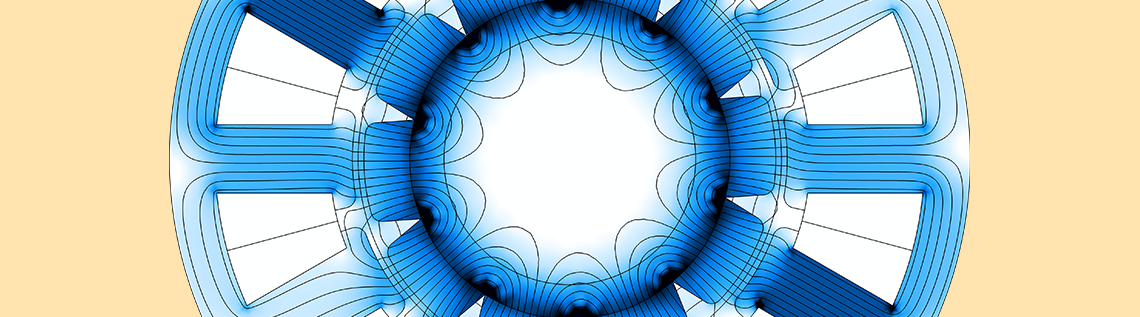
このモデルでは, エアギャップMMF波を求めるために, 連続性境界に沿った磁束密度の半径方向成分を評価します. ローターが回転している時に, MMF波が時間の経過とともにどのように変化するかを観察できます. 観察するだけで, 誘導電圧が完全に正弦波ではないことがわかります. 次回のブログシリーズでは, エアギャップ磁束の時空間フーリエ変換を実行する方法と, それらを連結磁束と電圧の高調波歪みに関連付ける方法について説明します.
左: ローター回転による磁束密度の変化. 右: ローター回転に伴うエアギャップMMF波の進行.
機械的トルクの解析と最適化
PMモーターの特定のスロット/極の組み合わせのステーター巻線を励起する方法はいくつかあります. 永久磁石機モデルの概略図(最初の図)に示されているパターンは, 12スロットの10極PMモーターを駆動できる1つの方法です. ステーターコイルの励起(またはローターの初期位置)は, 最大量のトルクがローターに加えられるように調整する必要があります. そうするために, ローターには初期角変位が与えられます. ローターの角度 \alpha は,1つのローター磁石の角度スパンにわたって変化し, 平均トルクが計算されます. 最大平均トルクに対応する初期角変位の値が, ローターの初期位置として選択されます. このようにして, ステーターとローターのどの相対位置が最大トルクを生成するかを容易に可視化できます.
このケースでは2つの最大値が観察されます.
- 反時計回りの回転に対応する正の最大値; 適切な相シーケンスが一旦与えられた場合.
- 時計回りに回転する負の最大値 (ここでも, 位相シーケンスを微調整した後).
次のセクションで示すロータートルク波形は, 平均ロータートルク曲線の正の最大値に対応します. トルク検査とアルキオ法や仮想仕事の原理など, トルク計算のさまざまな方法については, 今後のブログで詳しく説明します.
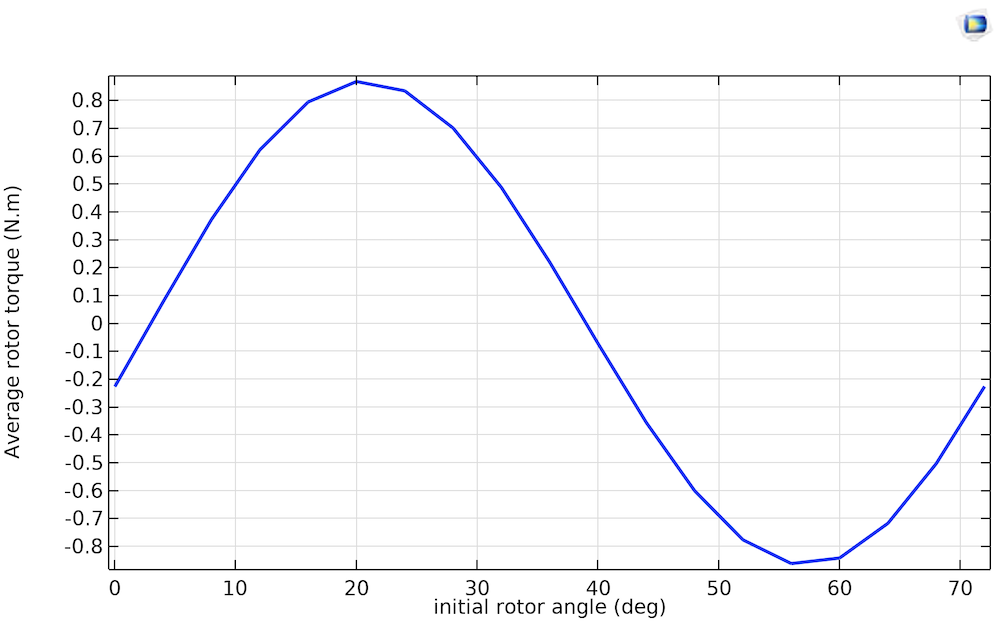
2つの回転子極のスパンにわたる初期回転子角度による平均回転子トルクの変化(2 \times \frac{{360}^{\circ}}{N_p} = {72}^{\circ}).
鉄の使用量と損失の解析と最適化
磁束密度プロットを使用することにより, 鉄心の磁束密度分布を調べることができます. ジオメトリの一部では, ヨークがボトルネックを形成する場合があります. これにより, 磁束密度の値がB-H曲線の飽和領域に押し込まれる場合があります. 他の部分では, それは低電界強度の領域を引き起こすのに十分な広さです. ヨークの特定の部分が常に弱い磁場を示している場合, その部分はトルク生成に十分に活用されていないことを意味します. 特定の部分が一貫したボトルネックを形成する場合, その部分はおそらく拡大されるべきです.
この例では, ローターとステーターの鉄の厚さを変化させ, ロータートルクへの影響を調べています. 最大量のトルクを生成するために, 前のセクションの平均トルク曲線から得られたように, 初期ローター角度は{20}^{\circ}に設定されます. 下のプロットとトルク曲線からわかるように, の厚さが約2 mmのときに, 鉄の使用率が最適になります. 2 mm未満にするとトルクに悪影響があり, それ以上にすると不要な材料, そして結果として不要な重量とコストをモーターに追加することになります.



鉄の厚さのさまざまな値に対する磁束密度分布. 左: 1 mm. 中央: 2 mm. 右: 3 mm.
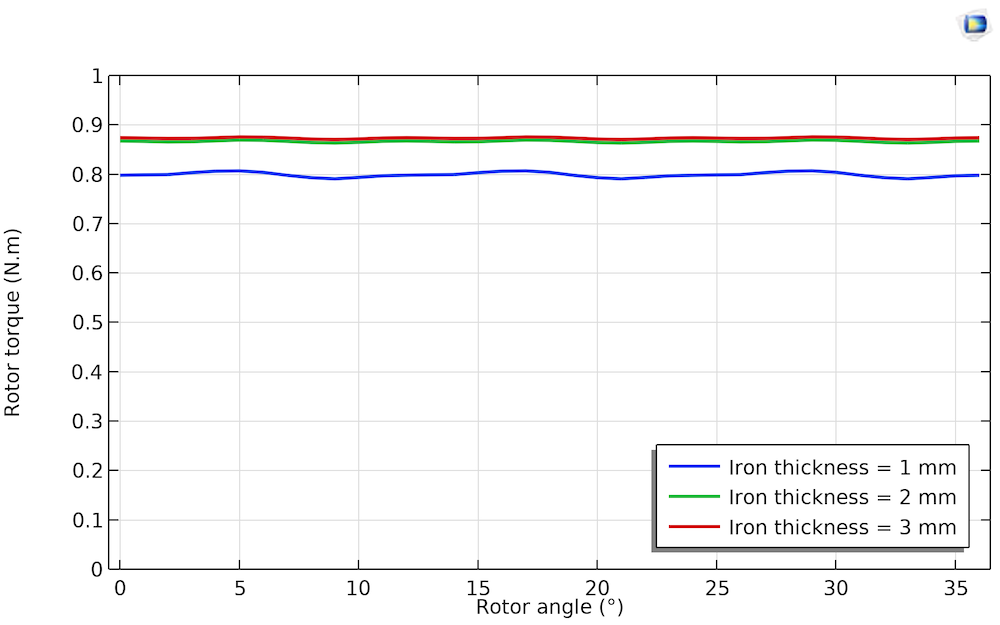
ロータートルク波形の鉄厚み変化.
ただし, これがすべてではありません. 鉄の厚さを決定する際には, 機械的強度や抵抗性および磁気的損失など, 追加の考慮事項があります. 磁束密度とトルクの解析を行う場合, 鉄の損失に対する鉄の厚さの変化の影響も評価できます. COMSOL Multiphysicsバージョン5.6の時点で, Steinmetz 方程式, Bertotti 公式, またはユーザー定義の損失モデルを使用して銅損と鉄損を簡単に評価するための組み込みの損失計算機能があります. 効率計算, 温度上昇評価, 振動解析, 騒音検査など, 回転機械モデリングのマルチフィジックスの側面については, 今後のブログでさらに説明します.



鉄の厚さのさまざまな値に対する鉄の損失分布. 左: 1 mm. 中央: 2 mm. 右: 3mm.
まとめ
COMSOL Multiphysics とAC/DCモジュールが提供するいくつかの機能を使用して, 回転機械のいくつかの設計面を簡単に理解する方法について説明しました. エアギャップ内の半径方向の磁束密度の線グラフが, 誘導電圧が正弦波になるかどうかを示すことを確認できました. COMSOL Multiphysics のパラメトリックスイープを使用して, 最大ロータートルクを生成する初期ローター角度を決定できます. 機械の磁束密度の表面プロットにより, 鉄の利用が効率的なトルク生成に最適であるかどうかを視覚的に判断できます. COMSOL Multiphysics が提供する組み込みの損失モデルを使用して, 鉄の損失に対する鉄の厚さの影響も観察できます.
このシリーズの最初のブログでは, COMSOL Multiphysics の強力なモデリングおよびポスト処理機能を使用して, 回転機械の設計に関する貴重な洞察を得る方法を説明しています. 今後のブログでは, トルクの計算方法, 効率の計算, 鉄損と熱性能の分析, モーターの振動と騒音の解析について幅広く説明します. 乞うご期待!
お試しください
下のボタンをクリックして, ここで説明する電気モーターをモデル化してみてください.
コメント (0)