COMSOL Multiphysics® ソフトウェアは, マルチフィジックス対応になるようにゼロから構築されているため, ユーザーはさまざまな物理現象を表すモデルを好きな方法で簡単に組み合わせることができます. これは, ソフトウェアの組み込み機能を使用するだけで実現できる場合もありますが, それ以外の場合は, ユーザーが少し余分な作業を行う必要があります. 電磁流体力学(MHD)モデルを構築するというコンテキストで, このようなワークフローを見てみましょう.
電磁流体力学のマルチフィジックスのモデリング
MHD 現象のモデリングは本質的にマルチフィジックスの問題です. 流体流れ, 電流流れ, および磁場の間のカップリングを数値的に解く必要があります. これらの異なる場はすべて 偏微分方程式, で記述され, 有限要素法で解くことができます.
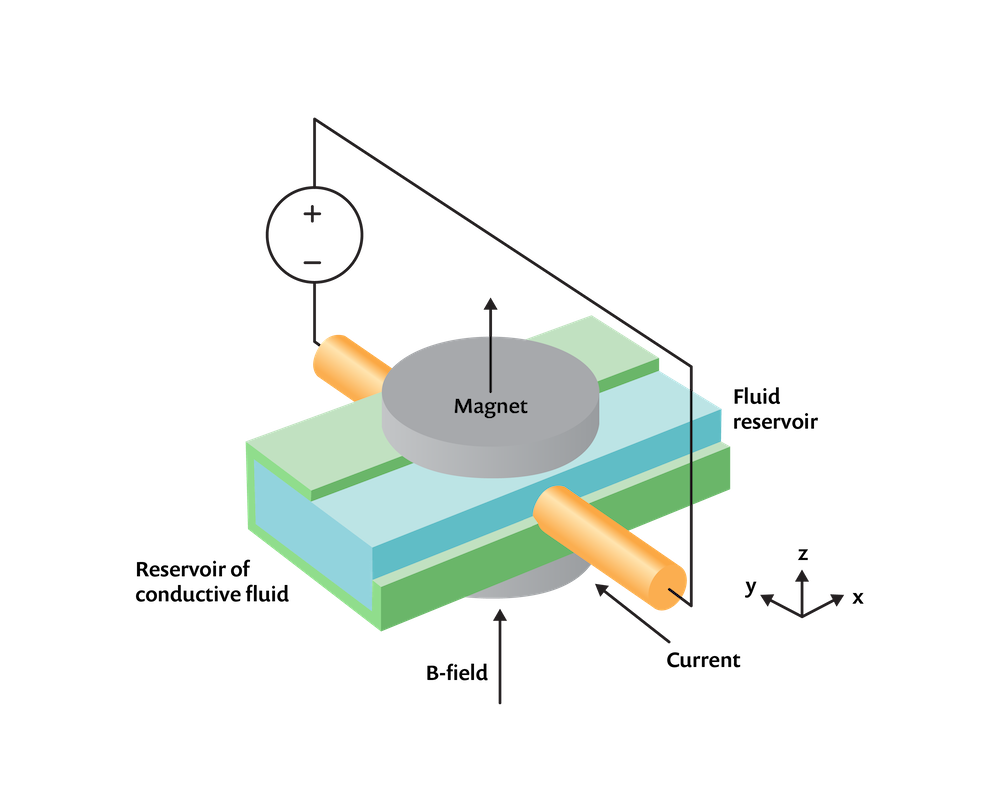
電流が印加された2つの磁石間のチャネル内の導電性流体のMHD問題.
上にスケッチしたように, 等しい静水圧の2つの無限のリザーバー(モデル化されていない)を接続する絶縁長方形流路内の非圧縮性導電性流体の, 比較的単純に見える問題のコンテキストでこれを実行する方法を見てみましょう. 電位差によって流体に電流を流す電極が両側の流路から突き出でいます. さらに, 2つの円形磁石が上下に配置されています. 磁石は静磁場 \mathbf{B} を設定し, 伝導率 \sigma の流体が速度 \mathbf{v} でこの磁場を移動すると, \mathbf{J} = \sigma \left( \mathbf{v \times B}\right) の誘導電流が発生します. これらの誘導電流に加えて, 電位場 V の境界条件の結果として発生する電流があり, 流体の総電流は次のようになります.
磁場を流れるこの電流は, 流体に \mathbf{F = J \times B} の体積力をもたらし, これは, あるリザーバーから別のリザーバーに流体を送り出すように作用します. システムは定常状態で動作していると仮定します.
電場, 磁場, および流れ場のカップリング
この問題では, 流体内の偏微分方程式系を解いて, 電界と磁界を記述する必要があります. 方程式は次の通りです.
.
この一連の方程式系は, AC/DCモジュールの一部である磁場および電場インターフェースを介して, アンペアの法則と電流保存機能と個別の速度(ローレンツ項)機能を使用して解かれます.
移動する流体の周囲の空間には電流が流れないため, 単一のベクトル方程式を解くだけで済みます.
ここで, \mathbf{B_r} は残留磁束密度であり, 磁区ではゼロ以外です. 上記の方程式のみを解く場合は, 磁場および電場インターフェース内で利用可能なアンペールの法則機能をご使用ください.
流路壁特性は場に影響を与えないと仮定しているため, モデルから除外します. 説明的な結果を提供する, 一連の材料特性と境界条件が使用されます. 系の対称性を利用するために完全磁気伝導体条件が使用されるxy平面を除いて, どこでも磁場境界条件は磁気絶縁条件となっています. 電極を表すドメインは, 電流の戻り経路を生成するために, 磁気絶縁境界に接触して, モデリングドメインの境界まで完全に拡張する必要があります. タイプ, 電圧の接地および端子はこれらの外面に適用され, 電気絶縁条件は他の全ての適用可能な境界に適用されます.
さらに, 流路内の流れ場についても解く必要があります. 流れは層流であると仮定し, 流路領域でナビエ・ストークス方程式 を解きます. 流れが乱流の場合, 乱流モデル を追加できます. ゲージ圧 がゼロの状態で, 開放境界条件が流路の両端に適用されます. さらに, 対称条件がxy平面に適用されます. 計算領域は下の画像に示されています.
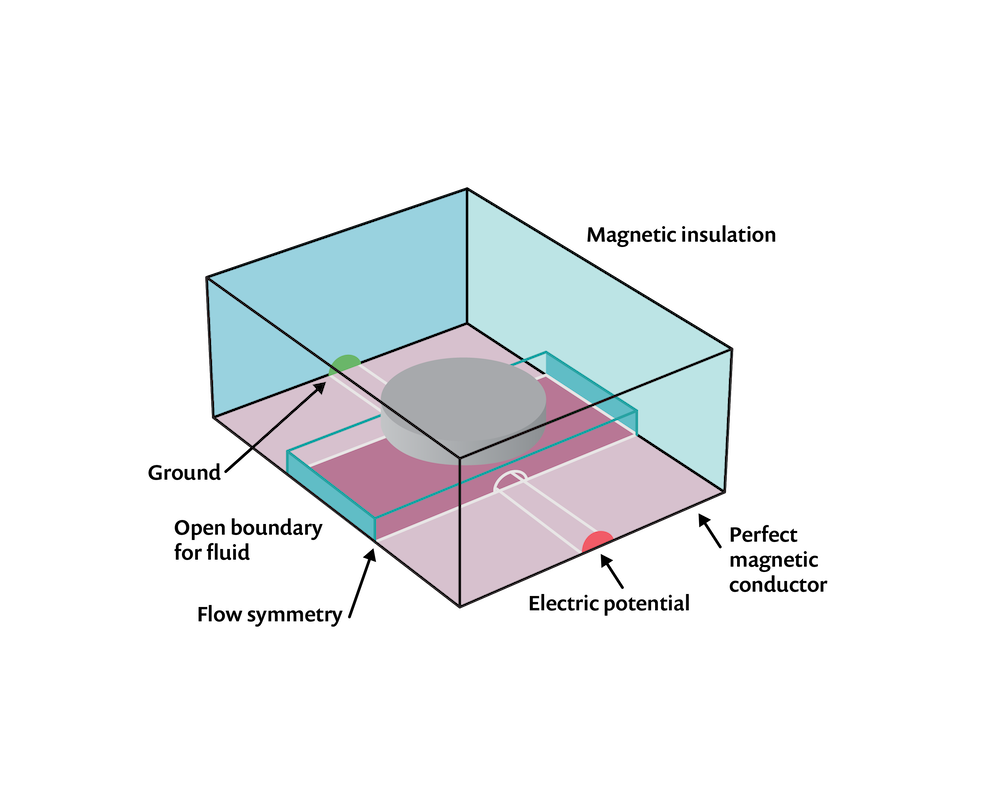
計算領域と境界条件.
流れは, 流体内の電流と磁場の相互作用によって発生する体積力 \mathbf{F = J \times B} によって駆動されます. この力の式はソフトウェアに組み込まれていないので, ここで少し手作業を行う必要があります. ユーザー定義のマルチフィジックスカップリングの実装に関するナレッジベースエントリで説明されているように, 方程式ビューを確認してレポートを生成することで, 電流と磁場の成分の組み込み式を求める必要があります. 以下のスクリーンショットで示しているように, これらの組み込み式は流体にかかる体積力を定義するために使用されます.
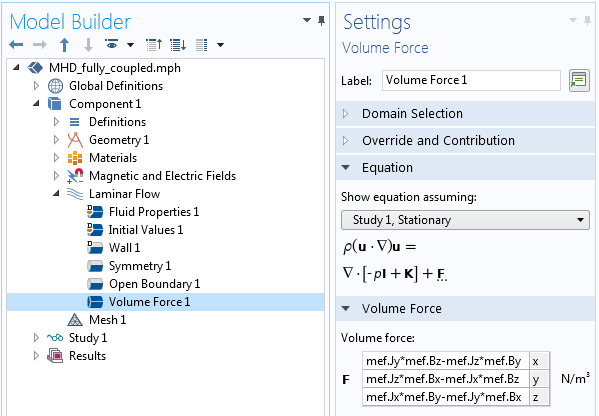
力の成分を計算する変数を示すスクリーンショット.
最後に, 計算された速度場を電磁問題と連成するには, 以下のスクリーンショットで示しているように, 磁場と電場インターフェース内の速度(ローレンツ項)機能を使用します. ソフトウェアは, この機能への入力として流体速度場を自動的に認識することがわかります. 以上です! これで, 2つの物理演算間の連成が完全に実装されました.
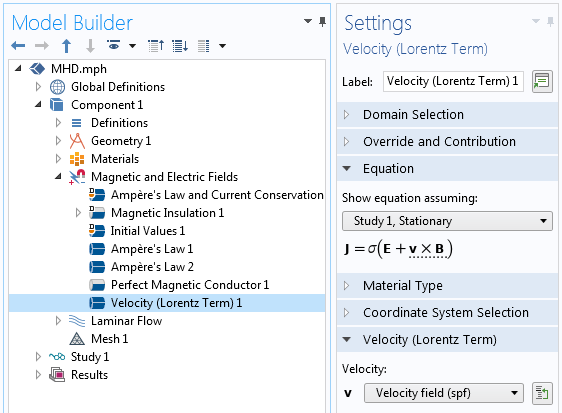
速度が磁場および電場インターフェースに連成されるところを示すスクリーンショット.
MHD問題のメッシュ化と求解
要素メッシュ化と要素次数について, ここで重要な関心事はモデルの計算サイズです. 流体および周囲の領域の磁場と電場を解くことは, モデルの最も計算コストの高い部分であるため, モデル全体のメッシュ要素の総数を最小限に抑えたいと考えています. 線形静的問題のいくつかの経験則に基づいて, 少なくとも2次要素を持つことが良い出発点であると言えます. したがって, 流体の流れの離散化をP2+P2の離散化に切り替えます. つまり, 速度と圧力の両方が2次の基底関数で記述されます. 磁場と電場は両方とも2次離散化を使用して記述されます. 全ての場は少なくとも2次に離散化されているため, ジオメトリの形状次数も自動的に2次になります. 別のメッシュ次数とメッシュサイズの完全な調査は, やる気のある読者の方の練習問題として残しましょう.
求解の際, ソフトウェアは, 自動でいわゆる分離方式を使って, 電磁場と速度場それぞれに対して独自に最適化された反復ソルバーで交互に場の線形系を計算します. このマルチフィジックスの問題は本質的に非線形であるため, 非線形定常モデルの収束の改善に関するこのナレッジベースで説明されているように, このような問題を求解するときに発生しうる問題とその対処方法を知っておくと役立ちます.
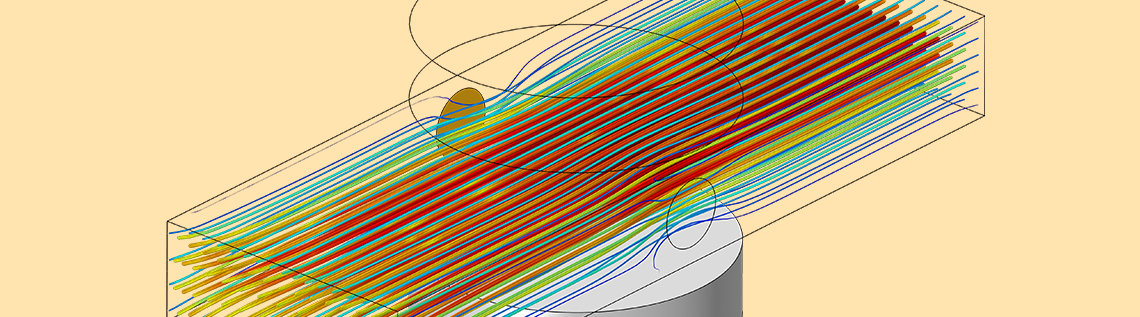
このマルチフィジックス解析の結果を以下のプロットに示します. 明確なポンピング効果が観察されます. 印加された電圧により, 流体に電流が流れ, これらの電荷が磁場を移動すると, 流体に力が加えられます.
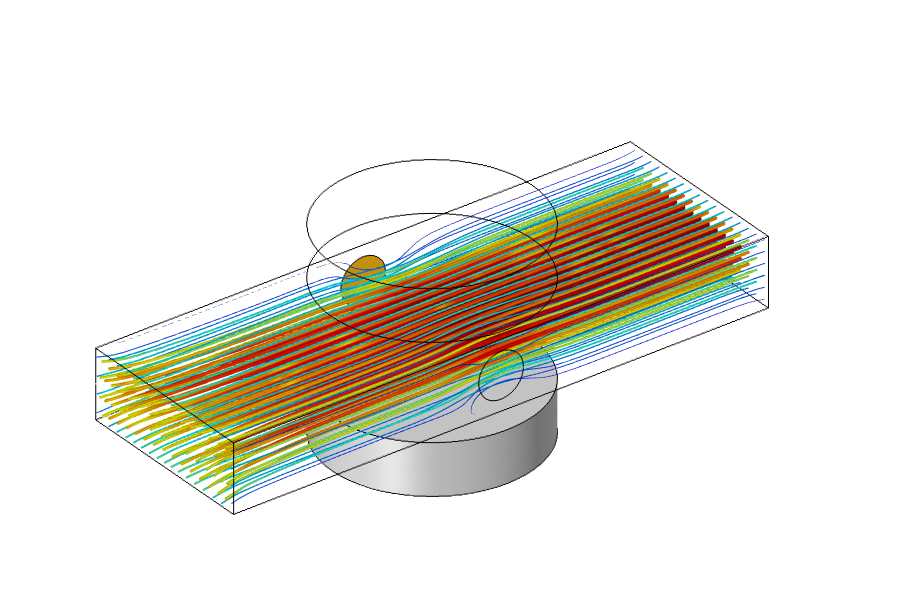
MHDマルチフィジックスカップリングによる流体ポンピングを示す結果.
MHDモデルの簡素化
これまでに構築したのは, 磁場, 電流, および流体の流れを含むモデルであり, 全ての物理方程式間の双方向カップリングを検討しました. つまり, 他の全ての物理現象に影響を与える可能性のある全ての物理現象ということです. しかし, 結局のところ, この特定のケースではそうする必要はありません. 次に, これがなぜであるか, そしてそれがどのようにモデルを単純化してくれるかを見てみましょう.
もとに戻って以前のすべての支配方程式を見てみると, 物理現象間のカップリングを導入する方程式は2つしかないことがわかります. 電流と磁場によって流体に力を加える方程式 \mathbf{F = J \times B} があり, 流体の総電流 \mathbf{J} = \sigma \left( – \nabla V + \mathbf{v \times B}\right) の方程式があります. 後者の式は, 印加された電圧境界条件と, 磁場を通る導電性流体の動きによって電流が発生することを示しています. ただし, 前者の項が後者よりもはるかに大きい(つまり, – \nabla V \gg \mathbf{v \times B}) と仮定すると, 現在の方程式は \mathbf{J} = \sigma \left( – \nabla V \right) に簡略化されます. これは, 流体の流れの問題が電流に影響を与えないことを意味します. つまり, 流れの方程式は, 電磁場の方程式とは完全に別個に解くことができます. 言い換えると, 最初に電磁界を解くことができ, 電磁界がわかったら, それらの電磁界を流れの問題への入力として使用するということです. これにより, 問題は一方向にカップリングされます.
さらに簡略化することもできます. 厳密に言えば, 磁場は磁石と電流の流れによって発生します. ただし, ここで検討する境界条件と材料特性では, 電流の流れによって発生する磁場, 磁石による磁場よりもはるかに小さくなります. したがって, 磁場は磁石だけが原因で発生するという単純化した仮定を立てることができます. つまり, 電流は大きな磁場を生成しないということです. 結果として, 電流がないと仮定して磁場を解き, 磁場(電流なし)および電流インターフェースをそれぞれ使用して電流を別々に解くことができます. これらのフィジックスインターフェースには, 前に説明したものと同様の境界条件とドメイン条件のセットがあります.
磁場(電流なし)インターフェースは, 方程式 \nabla \cdot \left( \mu_0 \mu_r \mathbf{H + B_r} \right) = 0 を定義します. これは, 磁場および電場インターフェースで定義された一連の方程式よりもはるかに計算コストが低くなります. また, この方程式は電流とは無関係に解くことができます.
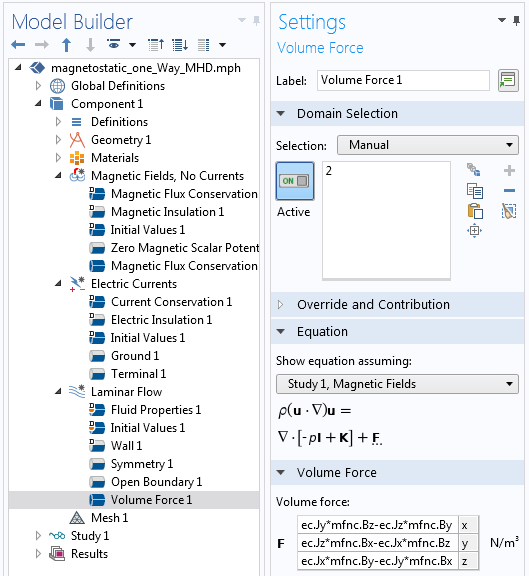
簡略化されたMHDモデルの設定を示すスクリーンショット.
上のスクリーンショットは, これらの簡略化を考慮した後の新しいモデルの設定を示しています. 流体にかかる体積力の式では, 異なる変数名が使用されますが, それ以外の点では, モデルは以前と非常によく似ています. 3つの異なるフィジックスインターフェースが3つの別々のスタディステップで求解されることにご注意ください. 磁場(電流なし)および電流インターフェース方程式は別々に解くことがき, 層流インターフェース方程式の前に両方を解く必要があります.
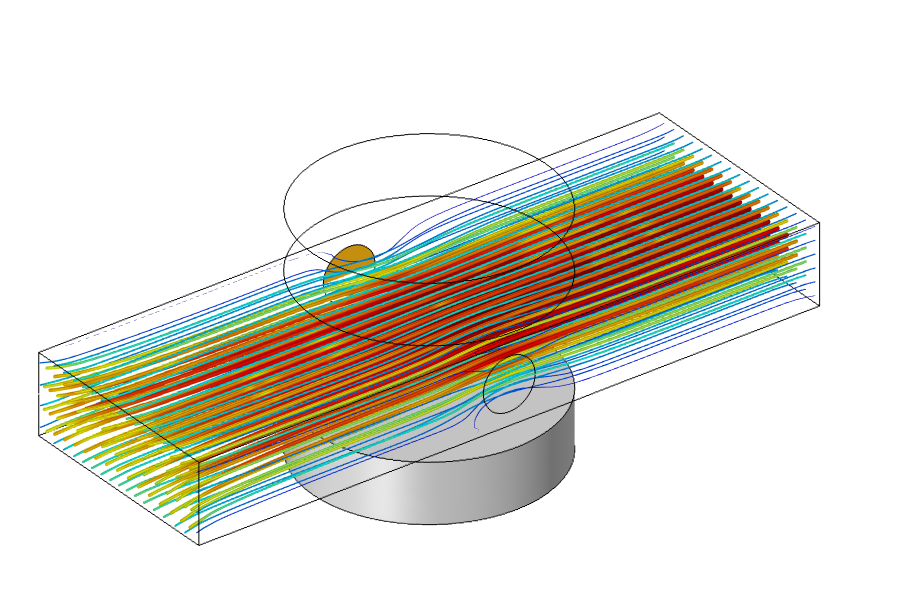
簡略化されたMHDモデルの結果.
物理方程式は個別に解かれ, ソフトウェアはそれらの間で反復する必要がないため, この単純化されたケースを解く場合, 完全連成の場合と比較して, 解く時間が大幅に短縮されます. 上記の結果から, 解は前の単純化されていないケースとほぼ同じであることがわかります. もちろん, 私たちが行ったこれらの仮定と単純化には限界があるため, 完全なモデルと照合することは決して害にはなりませんが, COMSOL Multiphysics プラットフォームのパワーと柔軟性により, 単純化されたモデルと完全なモデルの両方を簡単に構築し, 比較し, 必要に応じて変更することができます. 独自のマルチフィジックスモデリングを開始してみませんか? こちら から COMSOL にお問い合わせください!
提示されたサンプルモデルをダウンロードする場合は, 下のボタンをクリックして入手できます.
コメント (0)