私が大学の電気工学の授業で学んだことで, もう少し違う方法で教えてほしかったと思うことがいくつかあります. これらの用語は微妙な方法で誤用されることが多いため, 電圧と接地の概念はこのカテゴリに分類されます. 私たちはそれらに正確な定義を与え, 電磁気学の理解と優れた計算モデルの構築の観点からいくつかの興味深い事例についてお話します.
教科書の例
まずは, 独創的で最も単純な電気装置の1つである電池について考えてみましょう. 最も単純な形式では, 2つの金属片をみかんに刺すことで電池を作成できます. 懐中電灯などの電気機器に電池を使用できます. 私たちが電気工学の授業で最初に学んだことの1つは, おそらく次のような回路図の書き方でした.
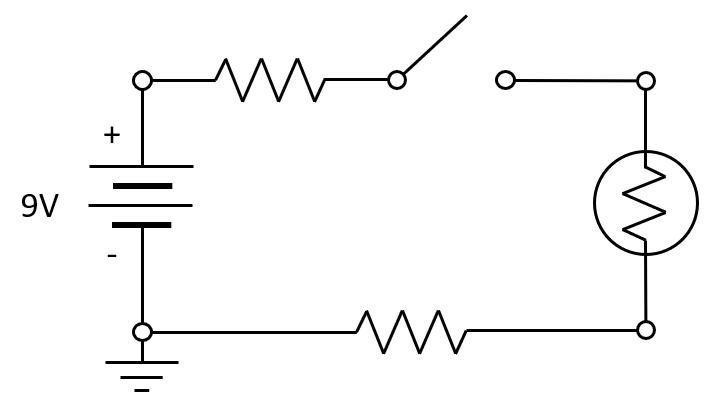
懐中電灯の基本回路図.
この図は, 1つの端子がスイッチに接続された電池があることを示しています. スイッチが閉じると, 電流が電球を流れ (光を発し), 抵抗を通ってもう一方の電池端子に戻ります. このデバイスは DC (時間不変) 条件で動作します. 抵抗器は, 電池と接続ワイヤーの内部抵抗を表します. これらの部品を接続する点は, 回路のノードと呼ばれます.
学校でおそらく与えられた演習は, 回路を流れる電流とさまざまなノードの電圧を計算することです. しかし, この文脈において, 電圧とは正確には何でしょうか? 電圧は, 電池の2つのノードなど回路内の2つのノード間の電位差として定義されます. ただし, 電池の一方の端子にも接地を描きます. 接地の定義は電位がゼロになるノードであることに注意してください. したがって, 9ボルトの電池が与えられた場合, もう一方の電池端子の電位がわかり, キルヒホッフの法則を使用して, 接地ノードに対する他のすべてのノードの電圧と電流を把握できます.
しかし, これには疑問が生じます. なぜその特定のノードを接地と呼ぶのでしょうか? ここでの回路は懐中電灯を表しており, 懐中電灯は他のものから完全に電気的に絶縁されていれば動作します. (懐中電灯を空中に投げることで確認できます.) 私たちが接地と呼ぶ, ネットワーク内のこの点は正確には何でしょうか? これは完全に任意ですが, 数値的に非常に便利な定義です. 実際には, 回路内の他の点を接地として選択しても (またはゼロ以外の値を割り当てて), 電流に関してまったく同じ解を得ることができたでしょう. ノード電圧は定数だけ異なります. つまり, ノードの電位について \mathbf{V} = \{V_1, V_2, V_3, V_4\} という解があれば, 理論的には任意の定数 \mathbf{V} = \{V_1+c, V_2+c, V_3+c, V_4+c\} を加えても有効な解が得られます.
ただし, これには注意点があります. 私たちはこの問題をコンピューターで求解していますが, コンピューターは有限精度の演算で動作するため, 10^{16} \approx 1/\epsilon のような法外に大きな定数を追加することは望ましくありません. ここで, \epsilon は倍精度浮動小数点の相対精度です. この値くらいから数値的な問題が発生し始めます. したがって, モデル内の1つの任意のノードをゼロ (接地) に設定することは, 教育的に便利なだけでなく, 数値モデリングの優れた実践にもなります.
有限要素法を使用して一連の領域内の電流を解く場合, 大きな変化はありません. 有限要素法は, キルヒホッフの法則の空間的に分散された形式と考えることができます. つまり, 有限要素モデルは本質的にははるかに複雑な回路図であり, これを数値的に解くには, モデリング空間内の任意の点を接地にするだけで済みます.
ちょっと待って下さい! 接地は任意であり, 数値的な目的のためにのみ存在するという意味でしょうか?
何人かの電力技術者が歯ぎしりしているのが聞こえます. 接地という用語には, 間違いなく非常に現実的で物理的な意味も含まれているからです. 私たちは接地を地球, つまり接地ストラップを接続する足の下にある大きな物質の球と定義します. 私たちはそれが何であるかを正確に知っています. それは非常に物理的なことです. しかし, 電気モデリングの観点から見ると, これは何を意味するのでしょうか?
電気的に言えば, 地球は非常に大きな導電性物質の塊であり, (少なくともこの説明の目的では) 抵抗は比較的無視できるほど小さいのです. これは, 接地の2番目の定義につながります. これは, モデルに接触している領域であり, モデル内の電位分布と比較して, 電流が流れるときの電位の変動が比較的無視できると想定されます.
この新しい定義は以前の定義とは明らかに異なっており, 人々はこれを ”アース接地” と呼ぶこともあります. また, “シャーシ接地” や ”フレーム接地” (空を飛ぶ飛行機や車のシャーシを思い浮かべてください) という類似の概念もありますが, 工場内を走る本当に大きなバスバーも接地と定義することができます.
ここでの大きな違いは, 接地の定義を単なる1点から空間の体積に変えたことです. この空間の体積は, 電流の無限の供給源であり, シンクです. つまり, 電子は電池や発電機によるアースとの電位差が存在する限り, 永遠にこのアース領域を出入りすることができます.
計算モデリング上, この接地領域をモデル化する必要は全くありません. モデリング領域がこの領域に接する境界を指定するだけでよいのです. この領域内の電気的変動は無視できるとすでに述べたので, この表面全体に均一な電位を適用することは正当化できます. また, 前述の数値的な理由により, 電位ゼロを選択します. これで, DC 電気システムのモデル化に使用できる接地の定義に到達しました. これは, 電流の無限のソースまたはシンクである領域を表すゼロ電位の境界です.
次に, これらの定義がモデリングのアプローチにどのような影響を与えるかを見ていきます.
COMSOL Multiphysics® での電圧と接地のモデル化
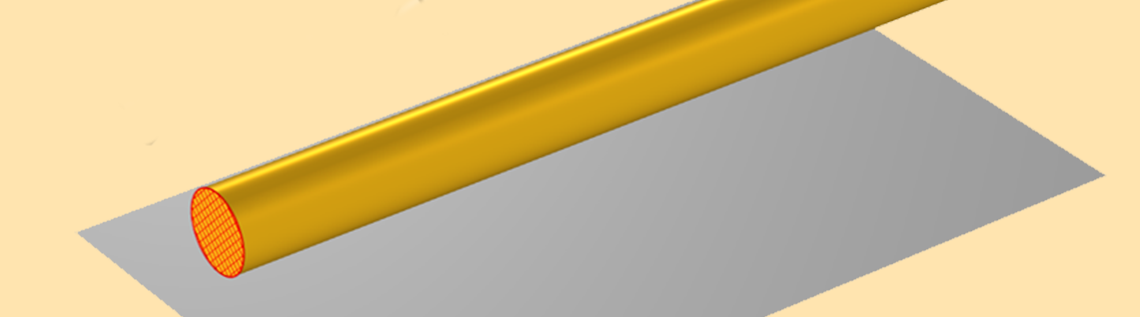
円形ワイヤーの直線部分だけを考えてみましょう. 一端が接地に接続され, もう一端が電源に接続されていると仮定します.
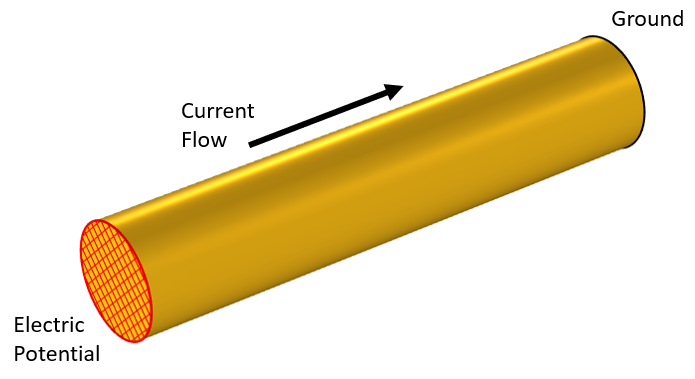
通電線の断面モデル
DC 条件下での電流の流れを解く場合, 電流インターフェース内で次の境界条件を組み合わせて使用します.
- 接地条件
- 電位条件
- 通常の電流密度条件
- 端子条件 (AC/DC モジュール, MEMS モジュール, 半導体モジュール, またはプラズマモジュールでのみ利用可能)
接地と電位はほぼ同じ条件です. 表面全体の電位を固定します. 接地条件は電位を正確にゼロに固定するだけですが, 電位条件を介して別の値を入力できます. 前述の定義に留意してください. これらの境界は, 電流の無限シンク (またはソース) である領域への境界を表し, その領域内の電位差は, モデリング領域と比べて無視できます. 電池の端子に接続されたワイヤーをモデル化している場合, これらは使用する適切な境界条件です.
3番目のオプションである通常の電流密度は, 表面を通ってモデルに流入する電流束を指定します. 境界を越えて電位が均一になるように固定するわけではありません. 通常, 標準電流密度条件のモデルには接地条件もあり, 注入されたすべての電流がそこから抜け出します.
また, 電流を注入する機能と電流を除去する機能の2つの標準電流密度機能を備えた, 適切に設定された有限要素モデルを使用することもできます. これらの電流の合計が正確にゼロである限り, 解決策は存在します. この解決策を見つけるには, 前述の理由から, 任意のポイントにポイント 接地条件を追加することをお勧めします. しかし, 興味深いことに, 3Dでモデリングする場合, 実際にはポイント接地条件を完全に省略し, 2つの通常電流密度機能だけを使用できます. 特定の有限要素メッシュに同じ量の電流を流します. 結果として生じる問題はゲージなしになりますが, 3Dモデルでは反復ソルバーを使用します. これは, 電位場が十分に制約されていない場合でも, “独自のゲージを選択” して収束します. ゲージ固定の詳細については, 以前のブログ, “ゲージ固定とは: 理論的紹介” と “COMSOL Multiphysics® でゲージ固定を使用するには?” を参照してください. ただし, これは, 非常に興味のある読者にとっては, 数学的な好奇心でしかないでしょう.
最後に, 端子条件については, 別途言及する価値があります. 端子条件には電位を指定するオプションがあり, この場合, 機能的には電位条件と同じです. 合計電流を指定するオプションもあります. 電流が指定されている場合, 端子条件は, 目的の合計電流がモデルに流入またはモデルから流出するように, 表面上の電位を解く追加の方程式を適用します. さらに端子条件では, 抵抗やその他の関心のある量が自動的に計算されるため, AC/DC モジュールまたは MEMS モジュールのいずれかを持っている場合は, 通常, これが推奨されるオプションです. S パラメーターの計算のために, 回路接続を指定したり, 消費電力を指定したり, 伝送線路への終端接続を指定したりするための他のオプションも端子条件内にあります. これらのより高度な条件については, 抵抗性デバイスと容量性デバイスにおけるモデリングに関する考慮事項に関する一連の講義で取り上げられています.
モデルを求解したら, そこからデータを抽出することもできます. 有限要素法を介して, ソフトウェアは場 V(\mathbf{x}) を計算します. そしてこれから, 電場 \mathbf{E} = – \nabla V と電流, \mathbf{J} = \sigma \mathbf{E}, およびこれらのベクトル場の大きさ (ノルム) も同様に抽出できます. モデル内の特異点の局所性を除き, これらの場はメッシュを細かくすると収束していくことに注意してください. これには対処する必要がある場合とそうでない場合があります.
最後に, モデル内の2点間の電場の線積分を求めることができ, この積分はこれら2点間の電位差と等しくなることに注意してください. スカラーポテンシャル場を扱っているため, この積分はパスに依存しません.
電圧を電場の経路積分として定義する上記の方程式は, 時間変化する電磁場のモデリングに移ると, 常に真であるとは限りません. これについては別のブログで取り上げますので, お楽しみに!
参考文献
- ブログの続きを読む: “Voltage and Ground When Modeling Wave-Like EM Fields”
- ラーニングセンターの関連記事をご覧ください: “Modeling TEM and Quasi-TEM Transmission Lines”
コメント (0)