数週間前, トップガンの最新作トップガン: マーベリックを観ました. 本当に素晴らしい映画で, エンジニアリングの観点からも最先端を行っています. トム クルーズ演じるマーベリックが, 秘密裏に開発されたマッハ10の飛行が可能な新型飛行機“ダークスター”のテストパイロットとして働くところから始まります. 同時に, エド ハリス演じるチェスター カイン提督が, —ダークスターがまだプロジェクト継続の条件であるマッハ10で飛行できていないため—, プログラムを中止させるためにテスト基地に向かいますが, マーベリックはカインに先手を打ち, カインが基地に到着すると同時に, マッハ10に挑戦するためにダークスターで飛び立ちます. 素晴らしいスタートでした!
衝撃波
トップガンの開始9分47秒, カイン提督がダークスターチームとともに管制室で, ミッションコントロール画面を見ているシーンがあります. その画面には, 飛行機周辺の密度勾配が表示され, いわゆるシュリーレン画像で衝撃波が可視化されています. このシーンを何度か再生した後, 私は, 衝撃波パターンを可視化するために空対空シュリーレン技術を使用しながら, ダークスターの近くを飛行する後続機がいない状態で, どうやってこのような映像を捉えることができるのか疑問に思いました. これを記録するために追従できるジェット機なんて存在しないでしょう. しかし, 私は, マーベリックがマッハ10の限界に近づくにつれて, シミュレーションをライブ更新するデジタルツインを使用していることに気づいたのです. その瞬間, 私は管制室のディスプレイに表示される速度と衝撃波の角度が合っていないことにも気づきました. 表示されていた衝撃波とダークスターの胴体の角度は, 実際のマッハ7.5–8の速度ではなく, マッハ1.1–1.2に近く見えました. これは間違いだったのでしょう.
そこから, このブログの着想を得たのです. “あの速度でダークスターの周りに衝撃波や速度場が発生したらどうなるのか”という疑問です. この疑問に答えるべく, モデルを作成し, フィクションでは描かれないフィジックスの要素を調べていこうと思いました. (現実には, このようなモデルは, 管制室に表示されているようなデジタルツインの代理モデルをトレーニングするのに使うことができます.)
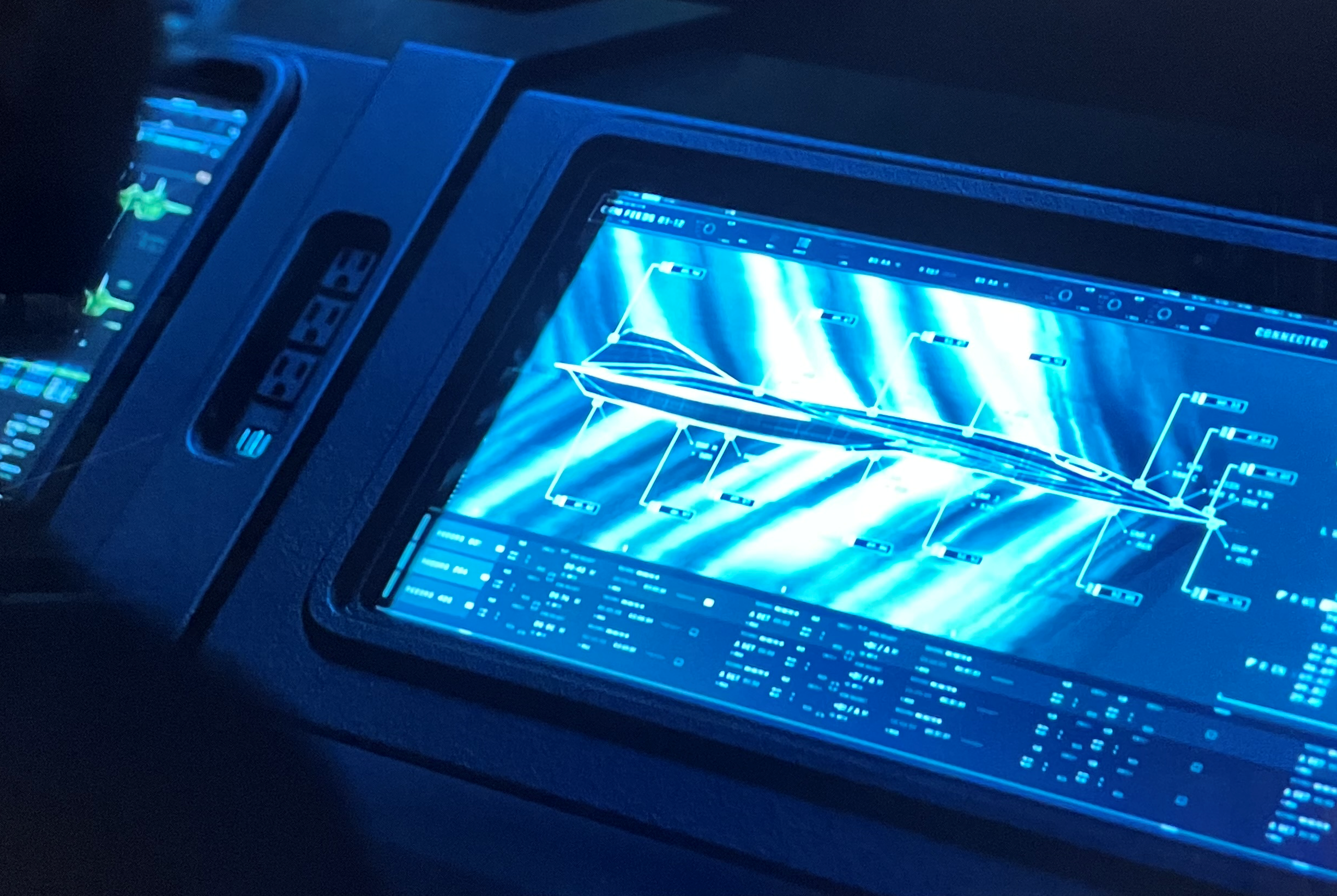
図1. 管制室のスクリーンに映し出された衝撃波のパターンを示すダークスターのデジタルツイン.
ダークスターのジオメトリのモデル化
モデルジオメトリの作成は, 3DプリントされたモデルやCADファイルなど, ダークスターの物理的な3Dモデルを購入することで比較的簡単に行うことができたでしょう. しかし, 私はゼロから始めることにし, CADチームの協力を得て作業を進めました. プロジェクトの期間が限られていたことと, 正確な詳細を得ることが難しかったため, 最終的なジオメトリでは詳細の一部を省略しました. 主に映画の画像と, 映画に登場したダークスターのプロトタイプの実物の画像を参考にしました.
モデルジオメトリは下図で見られます. 2番目の側面図では, 閉じたタービン入口と開いたスクラムジェット入口を備えた複合サイクル推進用のコンパートメントがあることにご注目ください.
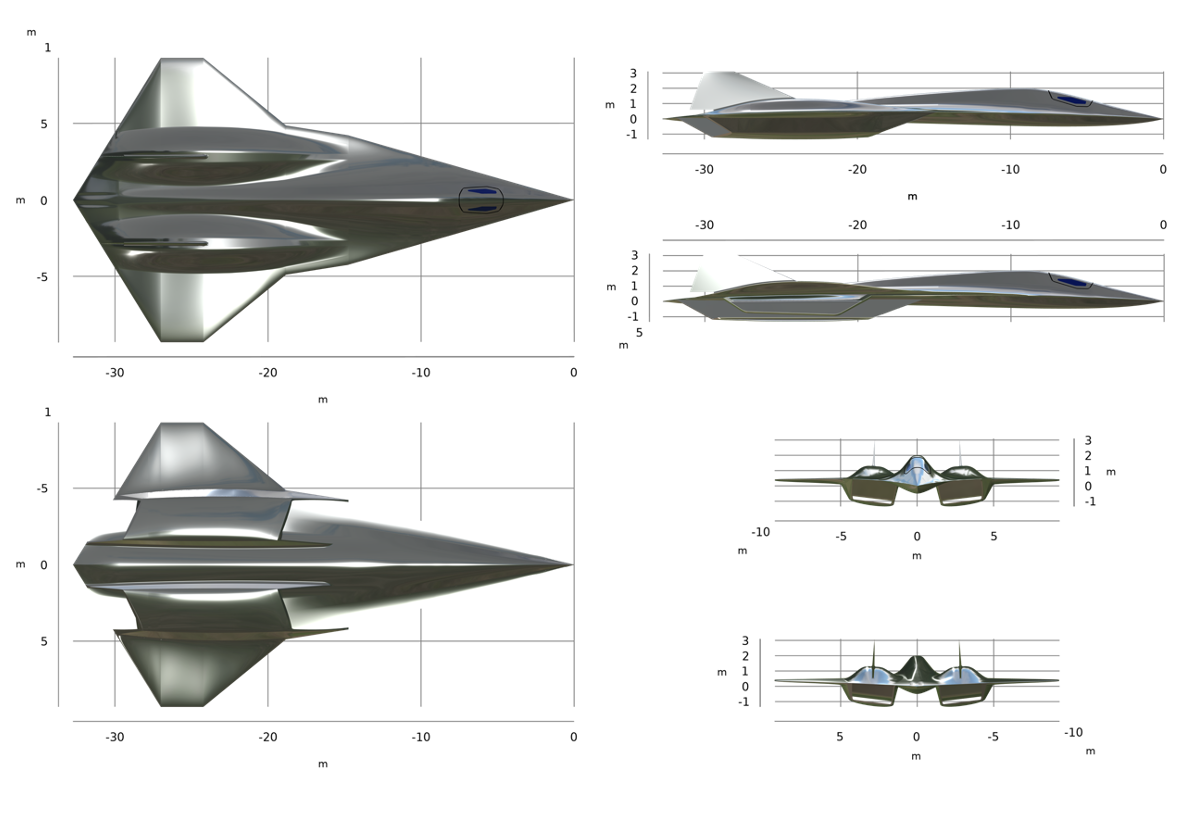
図2. ダークスターのジオメトリ.
速度の決定
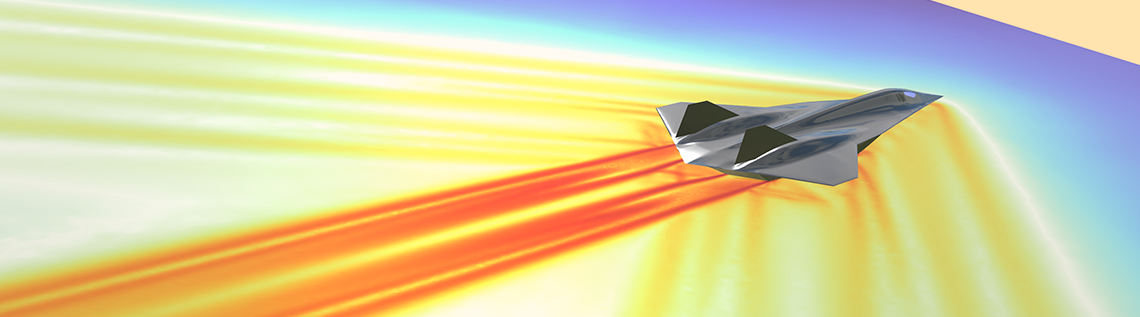
図3に示す最初のモデルでは, ダークスターはマッハ1.5の速度で飛行しています. ダークスターの機体周りの衝撃パターンを可視化するための最初のアプローチとして, 非粘性流モデルを使用しました. 図3は, 水平面上にプロットされた空気密度の勾配の大きさを, 速度場の流線とともに示しています. 密度勾配は, 現実のシュリーレン画像によって示されています.
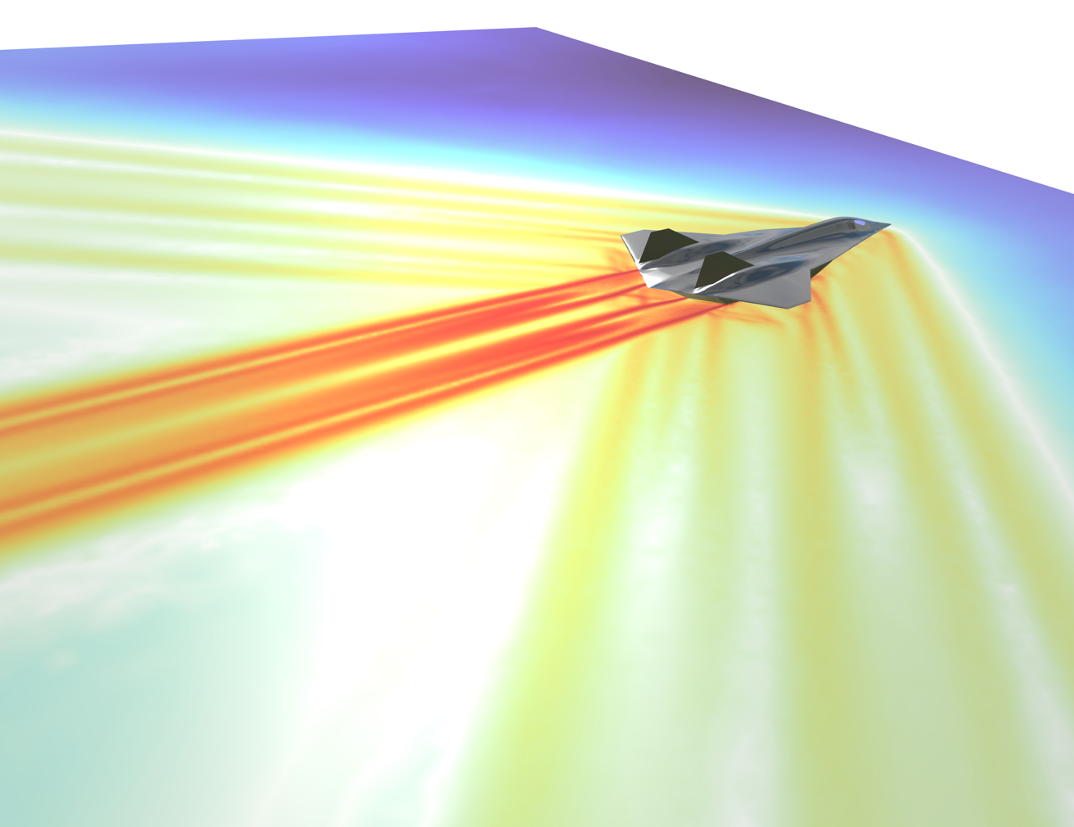

図3. マッハ1.5の速度で飛行するダークスター. 衝撃波と速度流線による密度勾配を示しています.
図4は, ダークスターの中央部を機体の長さ方向に沿って切断した垂直面と水平面の図です. 垂直面の図は, 映画の中で管制室のスクリーンに表示されるシュリーレン画像に対応しています.
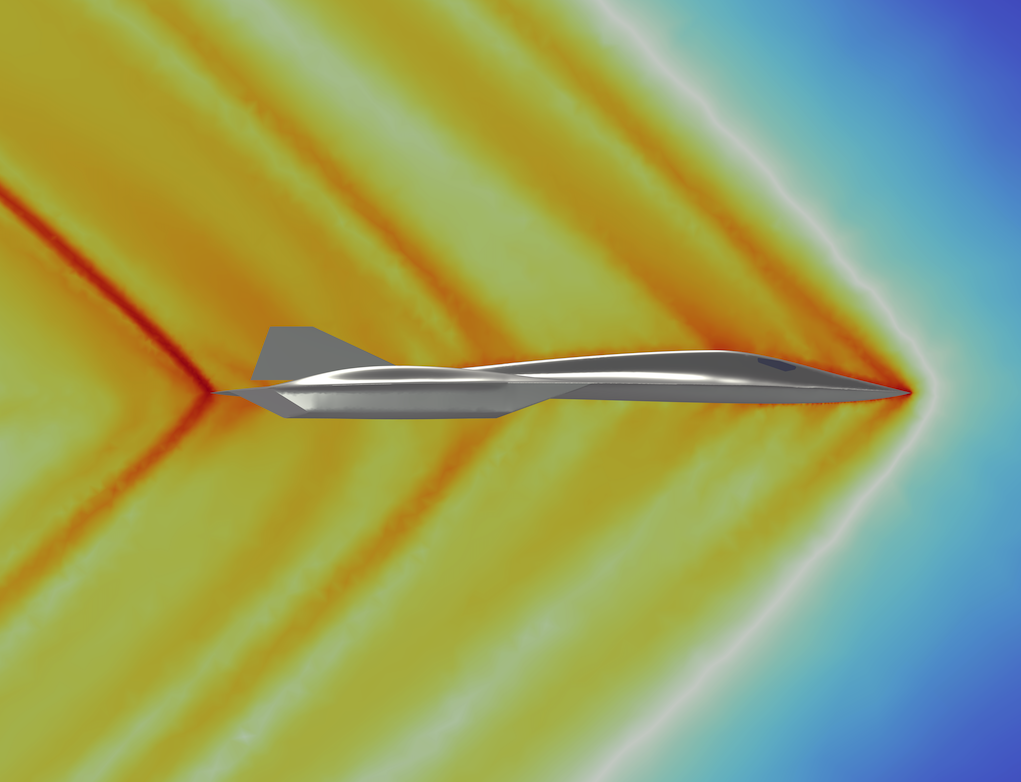
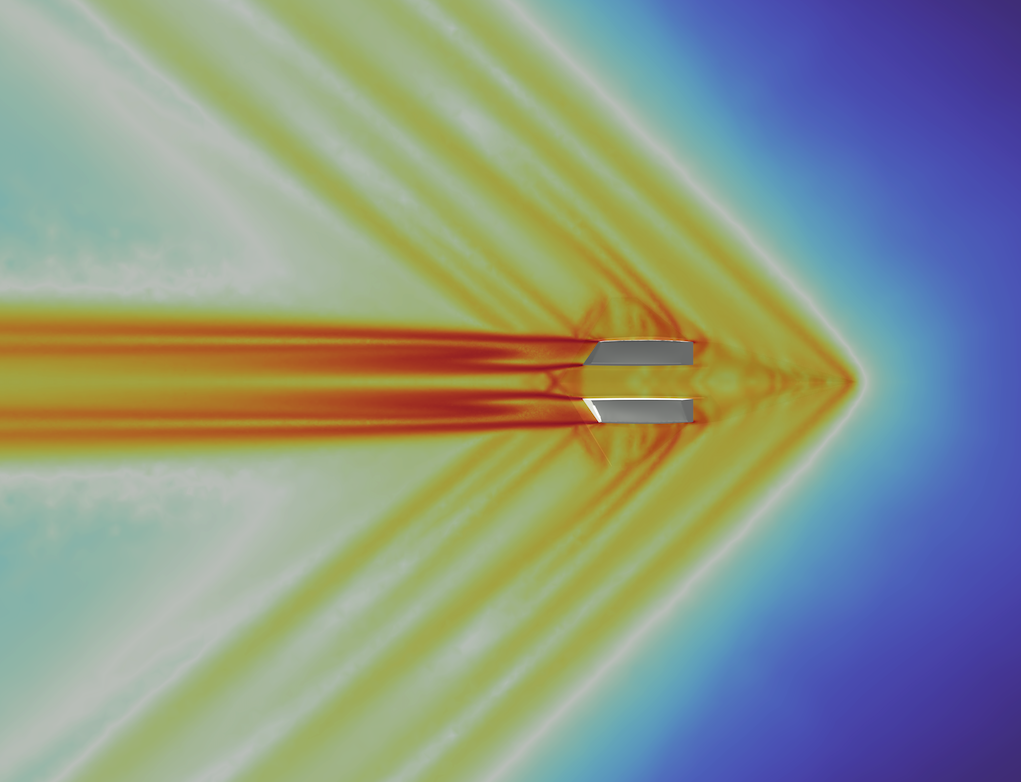
図4. マッハ1.5での横方向 (左) と下方向 (右) からの密度勾配の大きさ.
前述のとおり, 映画開始9分47秒で, ダークスターはマッハ7.5程度で飛行しています. 図5では, マッハ7.5での衝撃波を横から (左) と下から (右) 示しています. 密度の勾配の対数をプロットしていることにご注目ください. ダークスターの前方の白い波紋は, 数値安定化によって生じたノイズで, 大きさは1·10-7 kg/m3以下です.
マッハ7.5のシュリーレン画像はほぼ水平に見えますが, これは映画のコントロールルームでデジタルツインが示すものとは異なります. これは意図的なものだと思います. 映画のためにダークスターを開発した Skunk Works のエンジニアは, 速度がマッハ7.5よりはるかに低いことをわかっていながらも, そのビジュアルに満足したのでしょう.
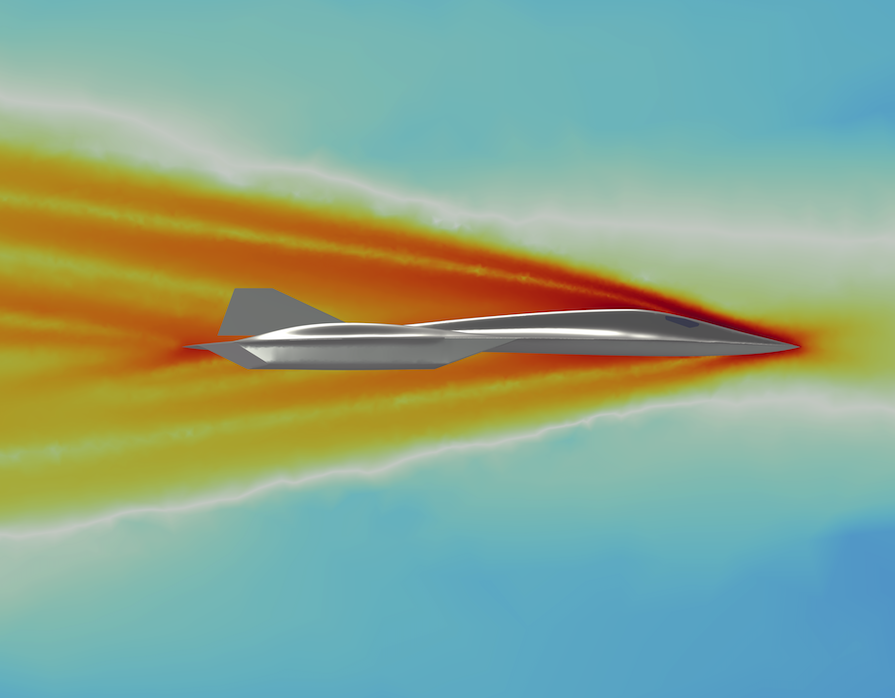
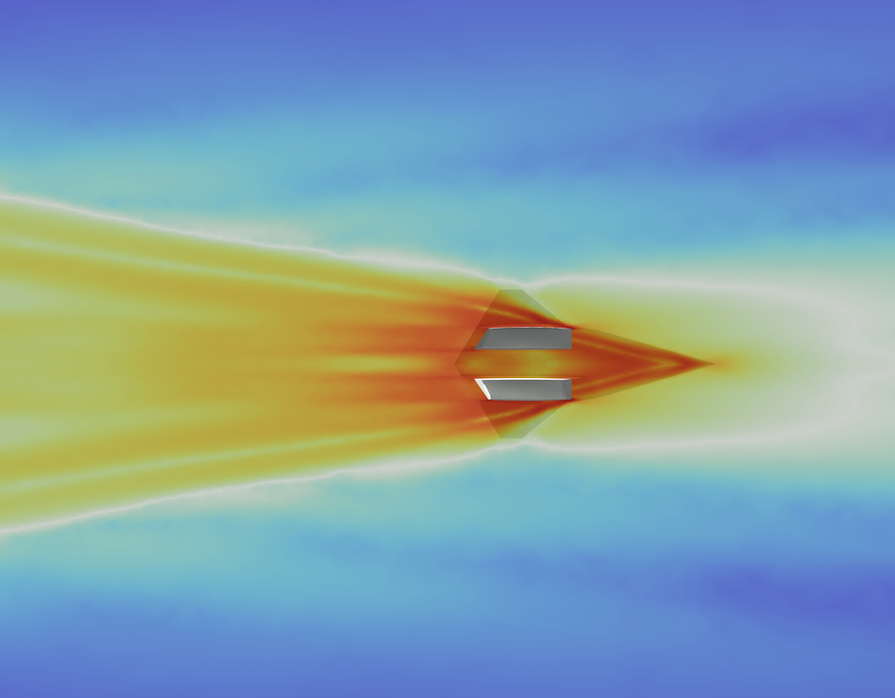
図5. マッハ7.5での横から見た密度勾配 (左) と下から見た密度勾配 (右) の大きさ.
マッハ数の等値面を図6に示しています. 左の画像はマッハ1.5で飛行するダークスター, 右はマッハ7.5で飛行するダークスターを示しています. 等値面は場の勾配からではなく速度から直接計算されるため, 図5に示した密度勾配よりも滑らかです. 等値面はジオメトリの半分にプロットされ, 垂直対称面が機体の長さに沿ってダークスターの中央を通っています.
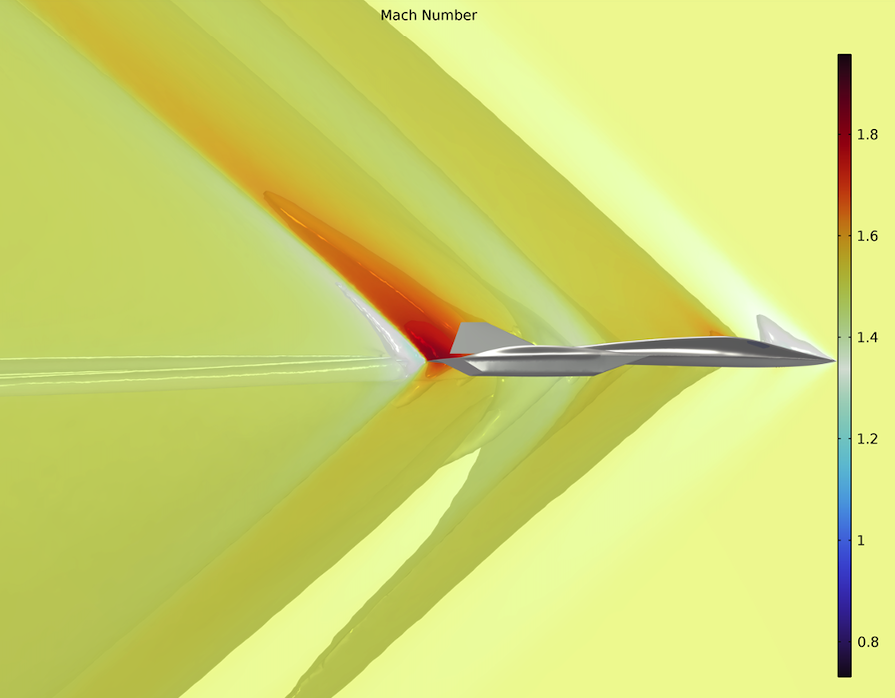
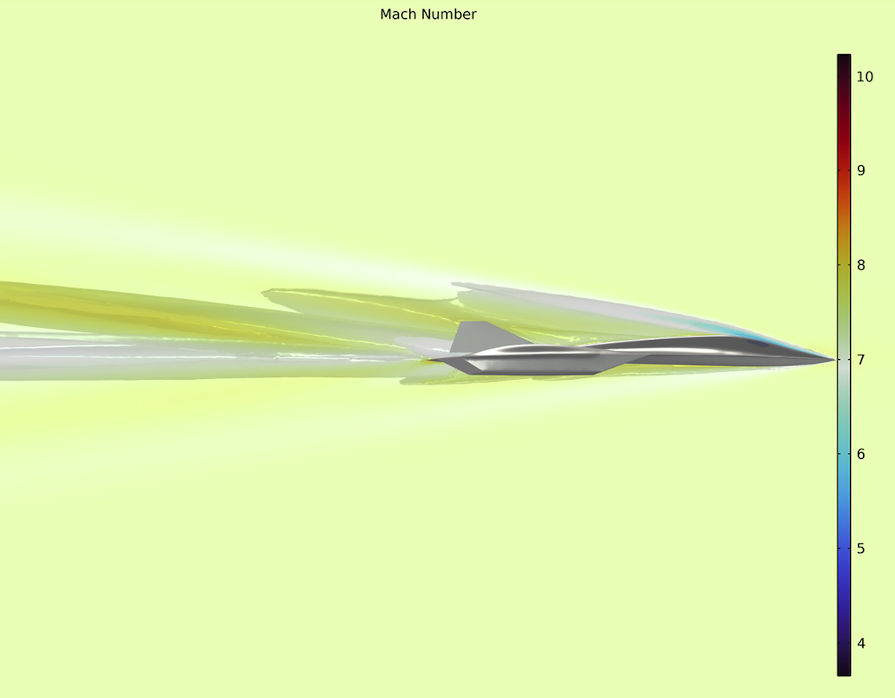
図6. マッハ1.5 (左) とマッハ7.5 (右)で飛行するダークスターの気流のプロット.
上に示した CFD シミュレーションでは, COMSOL Multiphysics®ソフトウェ アの高マッハ数流インターフェースを使用しています. このフィジックスインターフェースは, エネルギー, 質量, 運動量の保存を解きます.
ジオメトリを作成し, 高マッハ数の流れをシミュレーションした後, そこで止まらずに,ダークスターのステルス性をさらに追求しようと私は考えました.
ダークスターのステルス性は?
ダークスターは, 伝説のSR-71Blackbirdと同じ大きさで, F-35 ライトニングと同じ長さの大型航空機です. 上述した高マッハ数の流れモデルに基づいて, 我々はダークスターの音は人間が聞こえる範囲にあると結論づけました. しかし, レーダーからどの程度見えるのか, レーダー断面積はどれくらい大きいのかはまだわかっていません.
ダークスターは, 敵のミサイルが追いつくのが難しいほどの高速で飛行するでしょう (現在の兵器のほとんどを凌駕すると考えられます). とはいえ, 早期探知に関してダークスターが他のジェット機と比べてどうなのかは興味深いことです. 早期探知レーダーは, それぞれLバンドとSバンドに相当する1GHz (波長=30cm) から3GHz (波長=10cm) の周波数を使用します.
図7は, 飛行方向と逆方向から入射する垂直偏波の正面レーダー波によるダークスターの機体表面電流を示しています. レドームとエンジンカバーからの反射は, 1 GHzと3 GHzの両方で顕著であることがわかります. しかし, 垂直安定板からの反射は, 3 GHzに比べ1 GHzではるかに顕著です. さらに, 3GHzでの反射は柔らかいように見え, 機体を前方から指向性光で照らした場合の効果に似ています. この結果は, 周波数が高くなるほど物理光学近似に近づくため, 予想通りのことです.
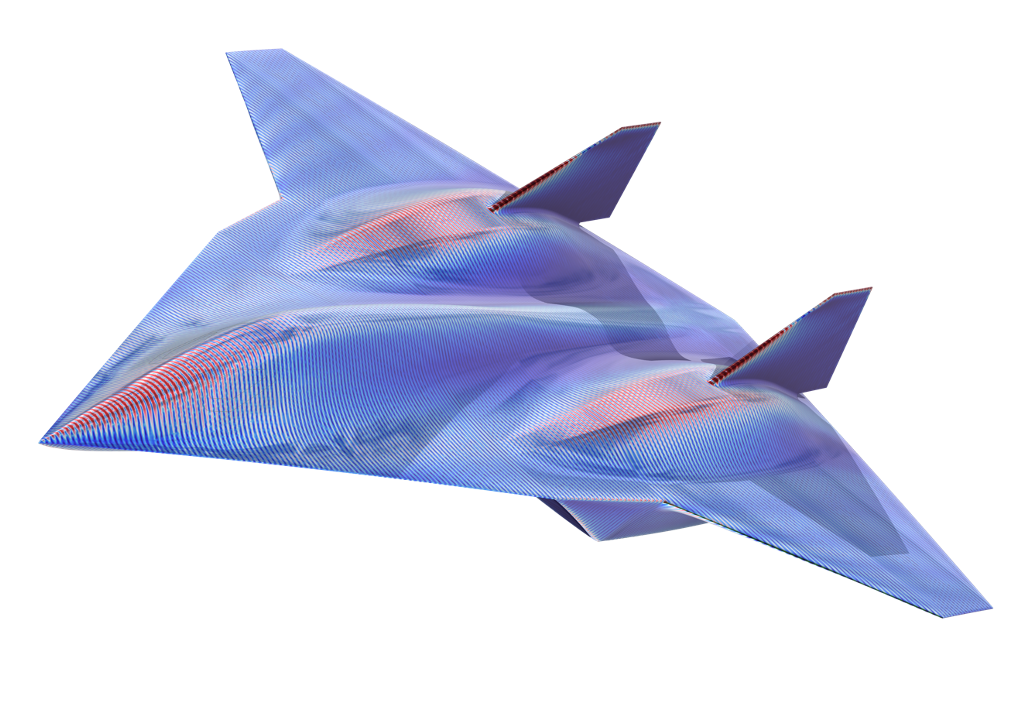
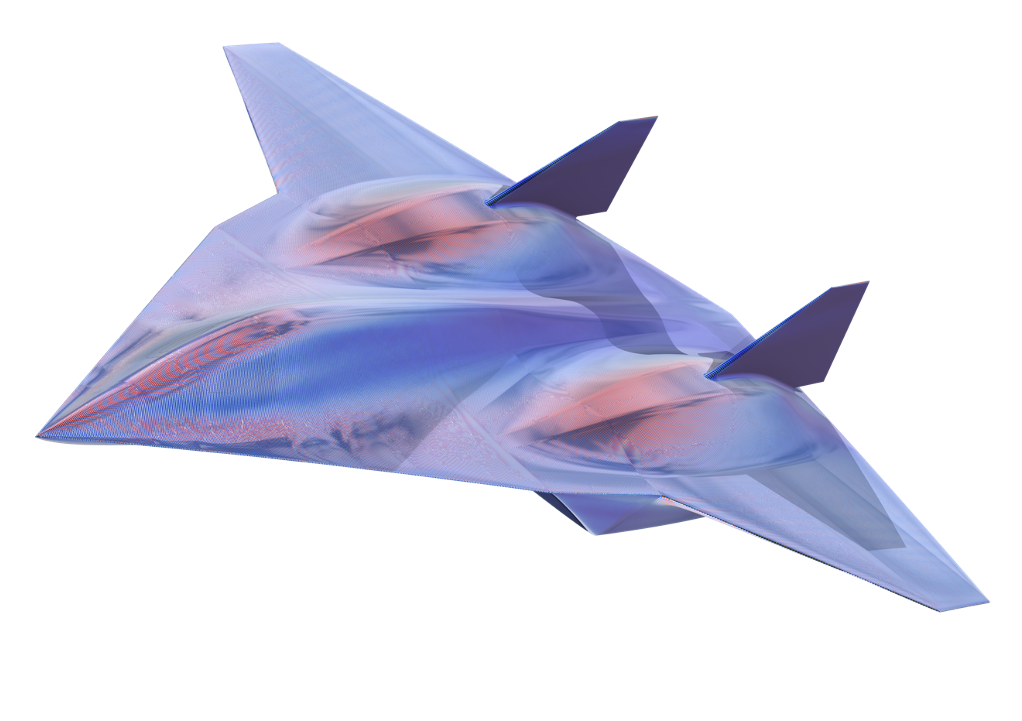
図7. ダークスターの機体に流れる1GHz (左) と3GHz (右) の表面電流.
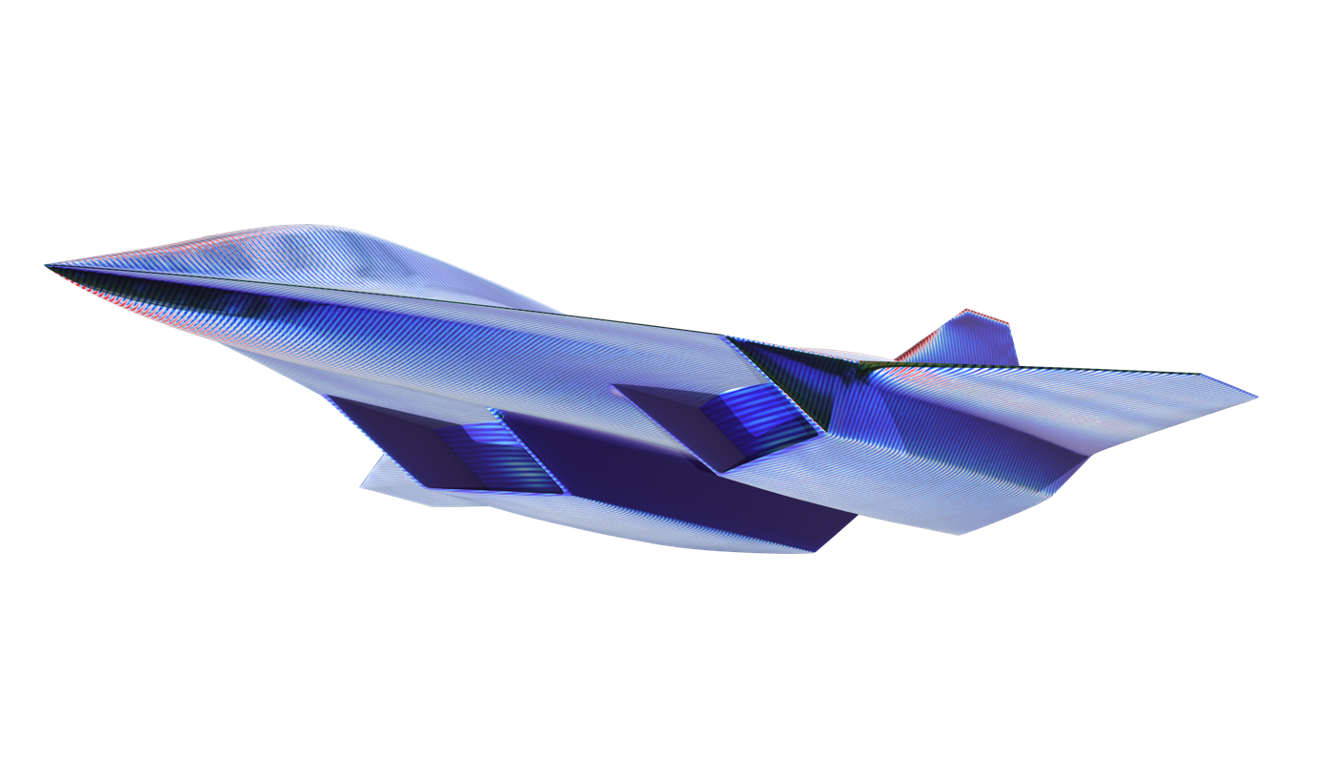
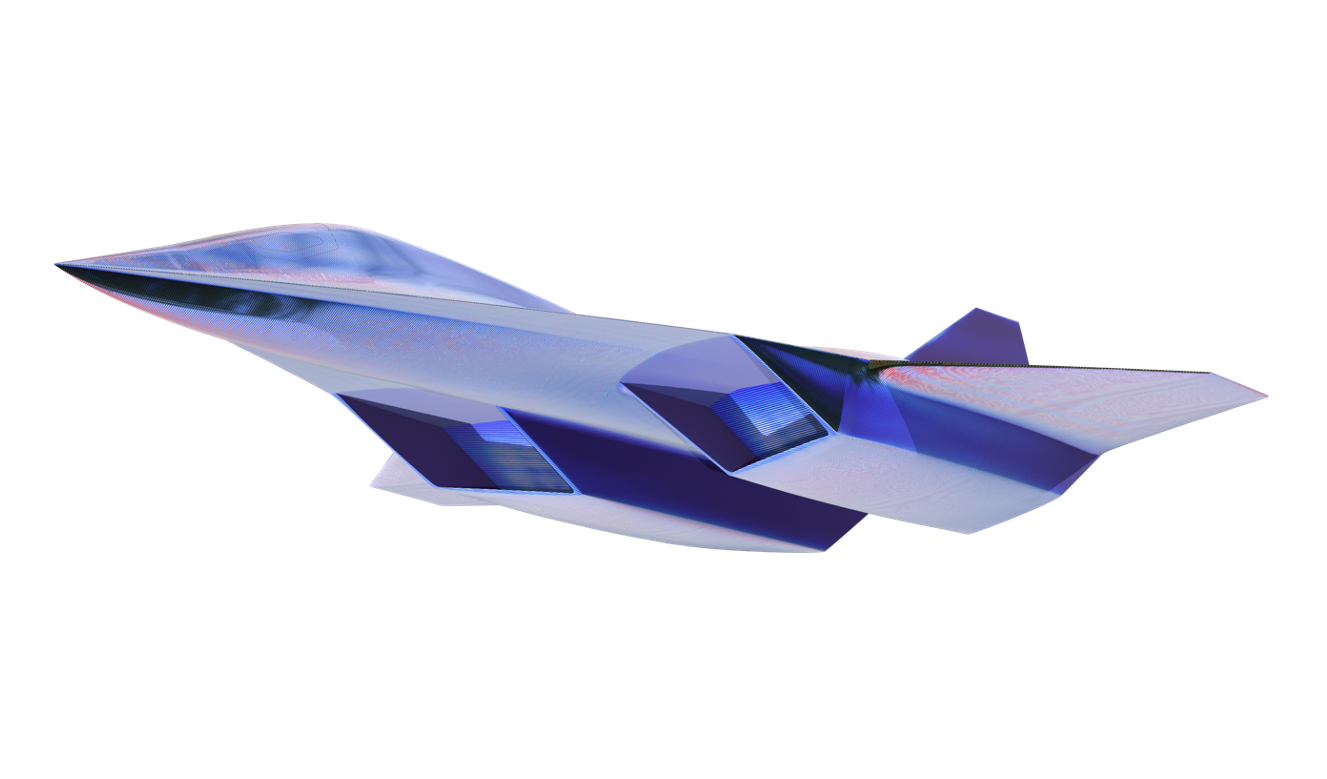
図8. 1GHz (左) と3GHz (右) でのダークスターの機体の表面電流.
電磁波を分解するために必要なメッシュはかなり密度が高いものです. これは, 波長を分解するために少なくとも5つの要素が必要であり, 3GHzの場合, 1つの要素の長さは2 cmを超えることができないためです.
図9. メッシュは非常に高密度なため, 拡大しなければ要素が見えにくくなります.
図10は, 1GHzと3GHzでのレーダー断面積を, 1 m2を基準としてdBで計算したものを示しています. プロットの後方散乱の半分は, ダークスターの接近を検知するために敵のレーダーに反射されるものです. すべての値は半円内に収まっており, この半円は0 dBの値を持ち, 1 m2に相当します. 実際, 1GHzで表示される最も高い値は-5 dB (0.3 m2)に相当します. 3GHzで表示される値は-10 dB (0.1 m2)未満であり, これは他のステルスジェットと同程度の大きさです. レーダー断面積は, おそらく10GHz付近のXバンドではさらに小さくなり, ダークスターは敵のミサイルにとってさらに厄介になるでしょう (いずれにしても, 飛行速度が早すぎて追いつけないかと思いますが).
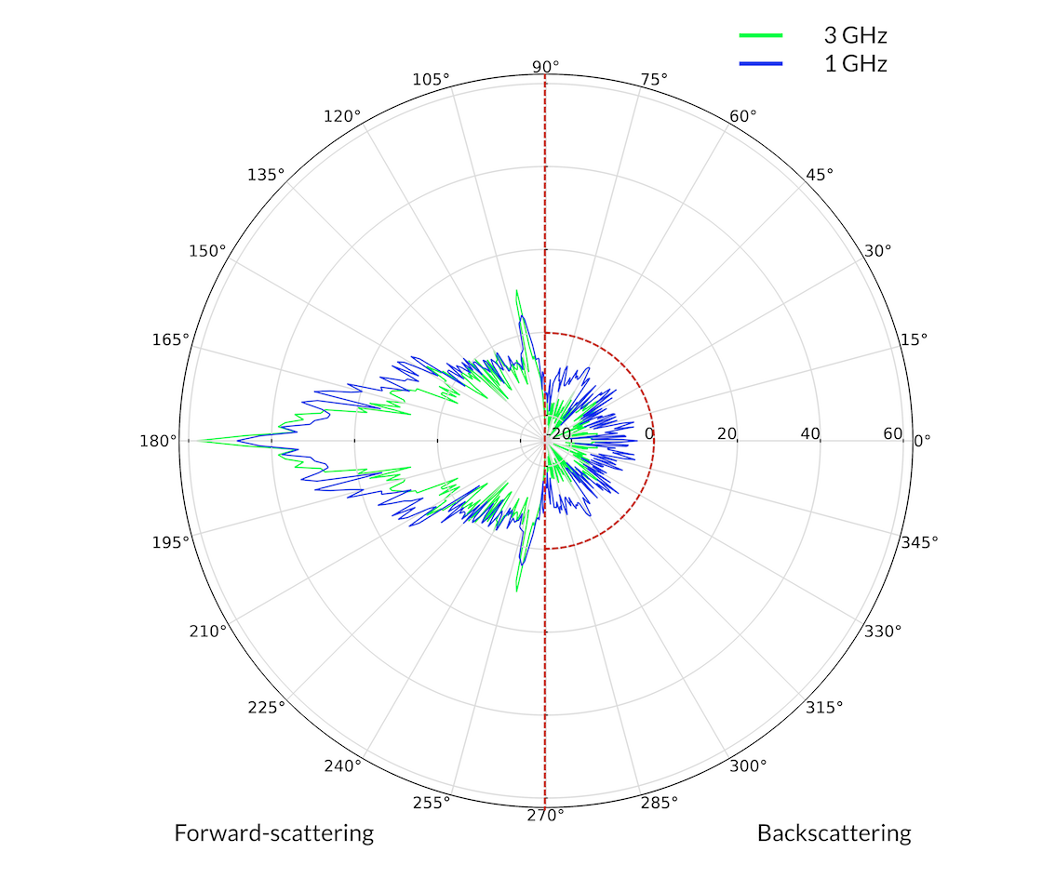
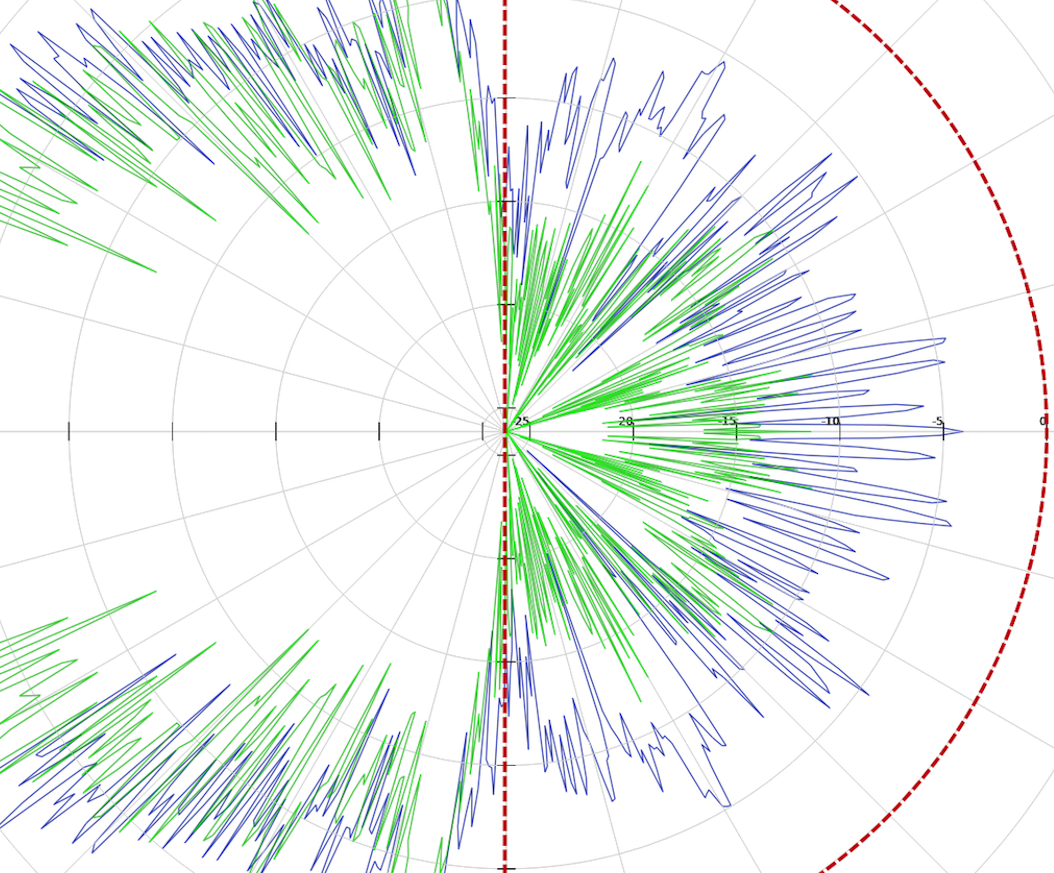
図10. 水平面の正面から見た1GHzと3GHzでのレーダー断面積の極座標図 (左)と, プロットの後方散乱部分の拡大図 (右).
重要なことに, ジオメトリの正確な記述があれば, レーダー断面積の計算がより正確になります. 例えば, センサー, 前方向きのレーダー, 計器盤のあるコックピットなどの詳細が影響します. 一方, ダークスターはおそらくレーダー吸収材で覆われており, レーダー断面積を減少させると考えられます. 私たちのシミュレーションでは, 実際にエンジンの吸気口にそのような塗料を塗りましたが, それ以外の場所には塗っていません. さらに, 極超音速で飛行するダークスターの表面にはプラズマが形成される可能性が高く, これもレーダー断面積に影響を与えると考えられます. ただ, ダークスターはミッション中はスクラムジェットモードで飛行し, タービンの吸気口を閉じることを踏まえると, いくらか計算は単純化されます. 開いている状態だと, タービンがレーダーを反射してしまうので, モデルに含める必要性が出てくるからです.
上記のシミュレーションでは, COMSOL Multiphysics®の境界要素法とRFモジュールを使用しました. 電磁波 (境界要素) インターフェースを使用することにより, より単純な物理光学的手法では考慮されないエッジ散乱, クリープ波, キャビティリターンを考慮することができました.
モデルを拡張し, 映画に戻る
前述したように, このブログで取り上げたモデルをより正確にする一般的な方法は, ジオメトリをより詳細にすることです. これは, CFDと電磁波シミュレーションの両方に影響します. ダークスターのジオメトリの精度を向上させるには, センサーを追加し, ダークスターの機体を形成するさまざまな金属板の間に小さな隙間や重なりを組み込む必要があります. また, コックピットの入り口, 窓, 着陸装置のドアに必要な隙間や詳細を含める必要があります. さらに, 金属で遮蔽されていない内部構造, ノーズコーンレーダー, 計器盤のあるコックピットなど, 機体内部の詳細も含めることが重要な場合があります. エンジンからの極めて高温の排気も, おそらくレーダー信号を反射すると考えられます. 最後に, ダークスターの機体, フィン, 翼のスイープ面は複雑で, 正確に再現するのが難しいのと同時に, CFDと電磁波シミュレーションの両方の結果にとって重要であることに注意してください.
私たちの解析には, 実際のモデリングとシミュレーション調査のすべての要素が含まれています. しかし, これは私たちの好奇心を満たすための練習に過ぎません. 忠実度の高い解析には, 航空機設計者, CAD, CFD, レーダーの専門家による何カ月もの作業が必要です.
さて, そろそろ映画に戻り, 素晴らしい冒頭シーンの続きを見ることにしましょう. 今回はモデリングやシミュレーションのことは考えないようにします…
その他の大ヒットコンテンツ
COMSOL ブログでは, メディアエンターテインメント業界に触発されたモデリングとシミュレーションの例を他にも紹介しています:
ダークスターとここで紹介したシナリオは, 映画 トップガン の架空の要素, あるいはそれに着想を得たものです.
コメント (0)