- COMSOL News 2025
- COMSOL News Special Edition: Food Industry
- COMSOL News 2023
- COMSOL News 2022
- COMSOL News 2021
海底構造物を可視化するための無人潜水艇の訓練
南ミシシッピ大学は, シミュレーションアプリを開発, 活用し, 無人潜水艇および水上艇の訓練に機械学習モデルを統合しています.Joseph Carew 著
2025年4月
ミシシッピ州沿岸の穏やかな日, 小型水上艇が試験海域で規則的に前後に牽引されています. この低磁気特性センサープラットフォームは, 強磁性ターゲットを探して海底を精力的にスキャンしています. これらのスキャンは, 南ミシシッピ大学 (University of Southern Mississippi, USM) の Roger F. Wicker 海洋事業センターが実施している野心的なプロジェクトの一部に過ぎません. USM の研究者たちは, モデリング, シミュレーション, 機械学習 (ML) を組み合わせることで, 波の下に何があるのかを自律的かつ正確に明らかにできるインテリジェントな無人潜水艇 (UUV) の基礎を築いています.
海底の強磁性構造のモデリング
多くの港湾の底 (および一般的な海底) には, 人工構造物や瓦礫, さらには不発弾などの強磁性体が存在します. 港湾交通がこれらの危険物に遭遇しないようにするには, 航海図にそれらの位置を正確に反映させる必要があります. これらの海底磁気異常をスキャンするより効果的な方法の一つは, 高度なセンサー聞きを搭載した UUV を使用することです. しかし, これらの探査機には, 製造コストが高く, 物理的なスキャンが複雑で, プラットフォームのノイズや環境ノイズ (環境によるクラッタ, 風, 波など) の影響が大きいため, 必ずしも正確な画像が描けるとは限らないという課題があります. さらに複雑なことに, 海底の様相が一意ではないため, 異なる海底構造のスキャン結果が似通って見えることがあります. USM のチームは, これらの課題を克服し, UUV を用いたより高精度なセンシングおよびマッピング技術の実現に向けて研究を進めています.
"私たちは, 海中と海面の両方 (図 1) における, 新しい無人システムプラットフォームのデータ駆動型試験と評価, そして高度なセンサー統合を数多く行っています" と USM の研究者である Jason McKenna 博士は述べています. "特に, 環境ノイズやプラットフォームが大きい UUV に磁気センサーを直接統合する方法について研究しています." 研究チームは, モデリング (実証データにより検証済み), シミュレーションアプリ, 機械学習技術を活用し, UUV に統合可能な計算システムを開発しました. このシステムは, 自動ターゲット認識 (ATR) と, UUV が記録する磁気場, そして最終的には重力場データの精度向上を実現します.

海底2万里にも満たない
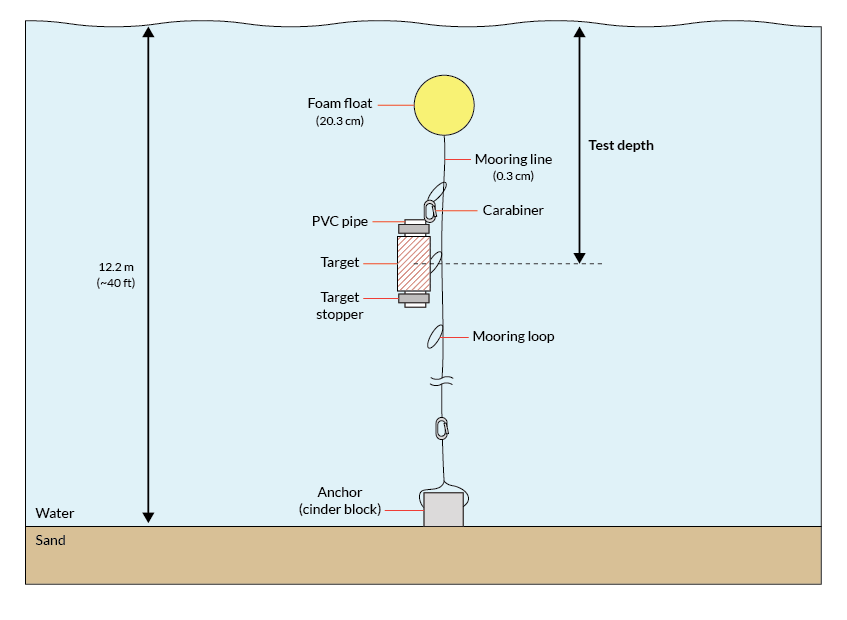
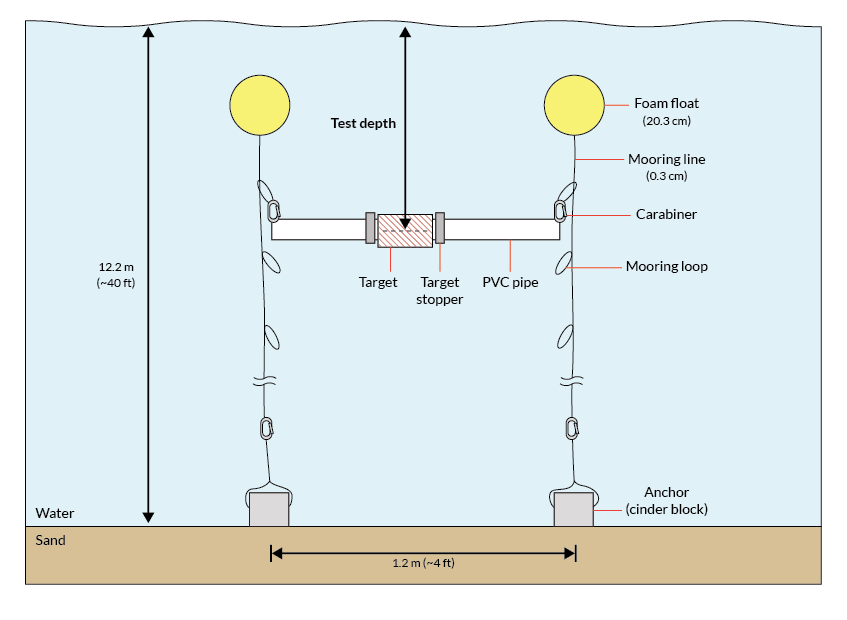
モデルを作成する前に, チームはモデルのベンチマークおよび検証に使用する実測データを取得する必要がありました. そのために, チームは高精度の重力センサーと磁気センサーで調査可能な既知のターゲットがある管理された海洋環境を訪れました. 物理実験はメキシコ湾近海で行われ, チームはウインチシステムを使用して, 2点間を70メートルにわたってセンサープラットフォームを牽引しました. 海面下では, センサープラットフォームは2つの異なるターゲットのいずれかをスキャンしました. 1つは直径 2.5 cm, 長さ 20.3 cm の円筒形の磁石で垂直に設置されたもの (図 2), もう1つは直径 11.4 cm, 長さ 30.5 cm の 鋼管で水平に設置されたもの (図 3). チームはターゲットごとにこれを数回繰り返し, 磁石またはパイプを保持するキャニスターを1メートル, 3メートル, 5メートルの深さに配置しました.
"ここで議論している物理法則は, 1/r の3乗減衰に従うため, 磁場は非常に急速に減衰します" と McKenna 博士は述べました. "何かを観測したいのであれば, 対象物に近づく必要があります. そのため, 考古学調査を行う際には, 一般的に磁力計を曳航し, 船舶の振動から十分離れた場所に置きます. 船舶の振動はノイズを発生させ, 海底からわずか数メートルの地点で浮上させます."
McKenna 博士は, チームが使用した磁石は, センサーが現場で遭遇する可能性のある振動よりも強い振動を発生させると説明しました. これは, 意図的に選択されました.
"私たちが使用するデータは決してクリーンではありませんが, (この実験は) 適切なアプローチ, 適切な物理学, そして適切な境界条件を用いることで, ここの対象物で経験するであろう現象の多くを近似できることを示しています" と McKenna 博士は述べます. "そして, それらの対象物をすべて加算し, プラットフォームのノイズを導入することで, 非常に複雑な結果を得ることができます."
合成データ生成のためのモデル開発
物理実験フェーズが完了すると, USM チームは UUV の性能向上に必要なアルゴリズムを得るために, いくつかのステップを踏む必要がありました. 最終的なプロセスは, ポテンシャル場モデルの作成と不確実性定量化 (UQ) 解析の実施, 検証済みモデルに基づくデータ生成可能なシミュレーションアプリの作成, そして最後に, 生成されたデータを用いて ML モデルを学習させ, UUV が対象物体を検出できるようにするというものでした.
ポテンシャル場モデル
McKenna 博士と彼のチームは, COMSOL Multiphysics® シミュレーションプラットフォームと AC/DC モジュールを用いてポテンシャル場モデルを構築しました. これらのモデルは, 磁場, 重力場, または温度場と物体との相互作用を表現できるため, 海底とその物体のシグネチャーを定量化するために不可欠です.
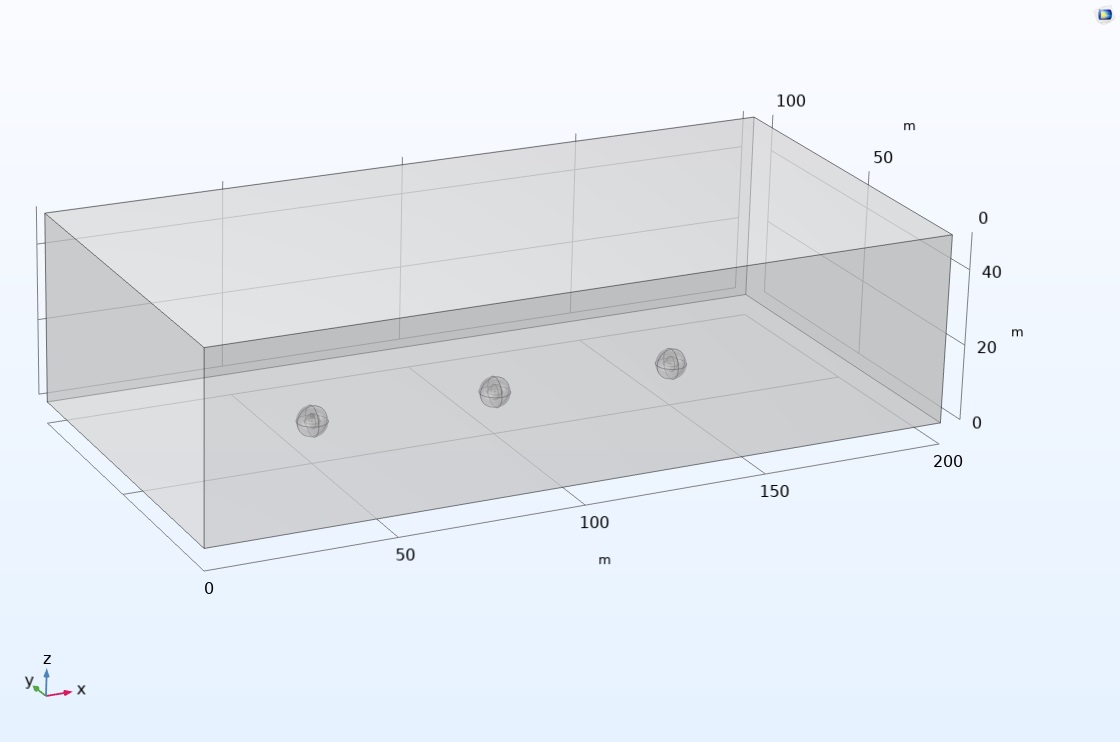
McKenna 博士はまず, 対象物体の物理特性を定義し, ソフトウェアに組み込まれている 磁場 (電流なし) インターフェースを用いて一連のターゲットを生成し, テストベッドを作成しました. 次に, シミュレーション空間に 低 (30.5 cm, 12 インチ), 中 (70 cm, 24 インチ), 高 (91.4 cm, 36 インチ) の磁気ターゲットを配置した空間構成を導入しました (図 4). 最後に, ターゲットと周囲の媒質との相互作用を計算しました. その後, 重力異常と磁気異常 (ターゲット) は様々な UUV シミュレーションから記録され, 異なるシナリオにおける潜在的な磁場変動のニュアンスを捉えた大規模なデータセットが得られました. これらの UUV シミュレーションに情報を提供するために, 研究チームは UQ 解析を使用しました.
不確実性の定量化による変数の精査
UQ 研究は, UUV の動作をモデル化する際に不確実性がどのように作用するかを検証し, 実世界の実験では再現できないパラメーターのギャップを埋めるために, チームのプロセスに統合されました. 具体的には, McKenna 博士は COMSOL Multiphysics のアドオンである不確実性定量化モジュールを用いて, スクリーニング分析と感度分析を実施しました. このモジュールは, 不確実性の特性評価, モデルへの入力不確実性の伝播, そして関心のある出力量の統計分析のための汎用インターフェースとして機能します.
"モデルの不確実性の定量化は非常に直感的でした" と McKenna 博士は言います. "主成分分析を用いて行うのと同様のスクリーニング分析を試してみたかったのです. これは, 多くの変数の依存性を明らかにする非常に洗練された方法です."
McKenna 博士と彼のチームは, スキャンで測定しようとする強磁性構造またはデバイスのパラメーターの予想範囲を特定することができました. チームは, ターゲットの長さ, 壁の厚さ, 磁化率をパラメーター化し, 地球磁場 (UUV スキャンによる金属物体の探査における特徴の誘発に最も大きく関与する要因)の影響を導入することができました. これらのパラメーターの有効範囲に関する知見により, 電位場モデルを容易に再較正, 解析することが可能になり, 通常であればチームが水上で数日を要し, 膨大な計算コストをかけて実施する様々な UUV 探査を再現できるようになりました.
磁気緯度, 経度, そして力場の強度をプラスマイナス x% 変化させることで, チームは変化の影響を測定することができました. "この方法で感度分析を行うことができます. 不確実性の定量化を用いてこれらの値の範囲を特定し, ある程度の理解を深め, 測定値が期待通りかどうかを判断できます" と McKenna 博士は述べています. "数分から1時間で, 機械学習アルゴリズムのための豊富で堅牢なトレーニングセットを構築できます."
検証済みモデルから ML トレーニングアプリへ
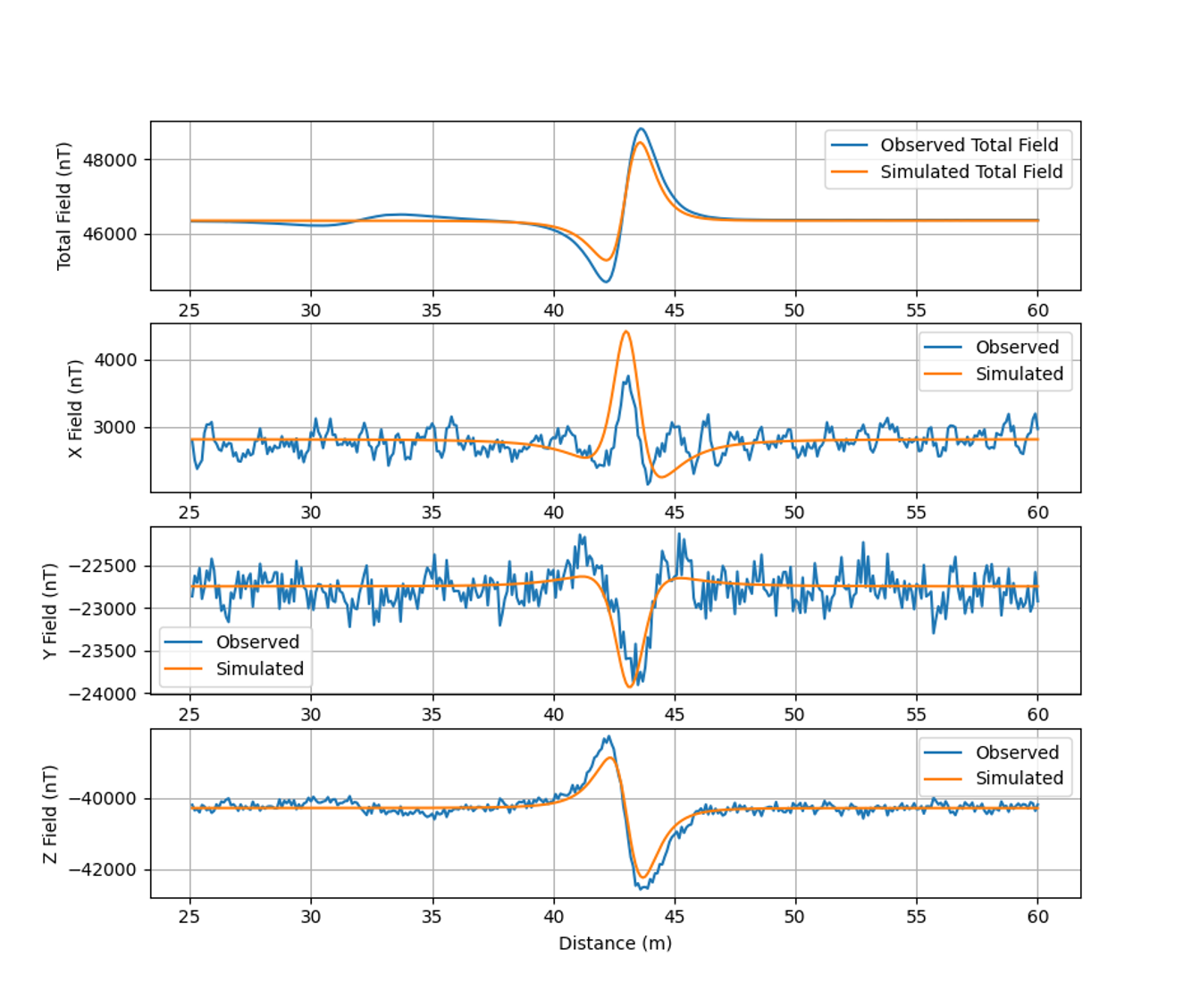
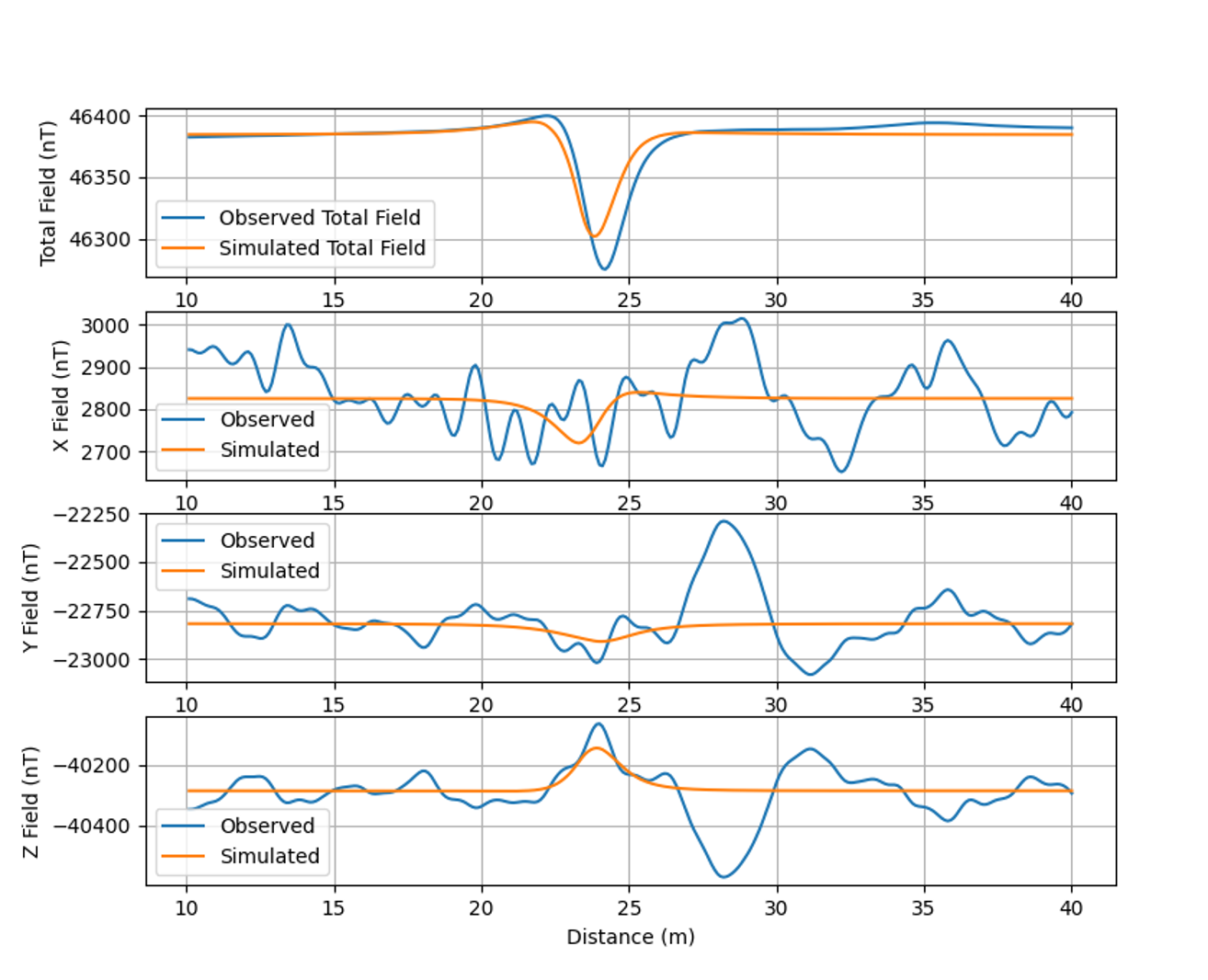
不確実性の定量化研究が完了し, 電位場モデルが確立されると, McKenna 博士はシミュレーション結果を実際の実験と比較することができました (図 5). 彼は比較のためにいくつかの単純化されたモデルを作成し, よく一致する多くの有意義な結果を得ました.
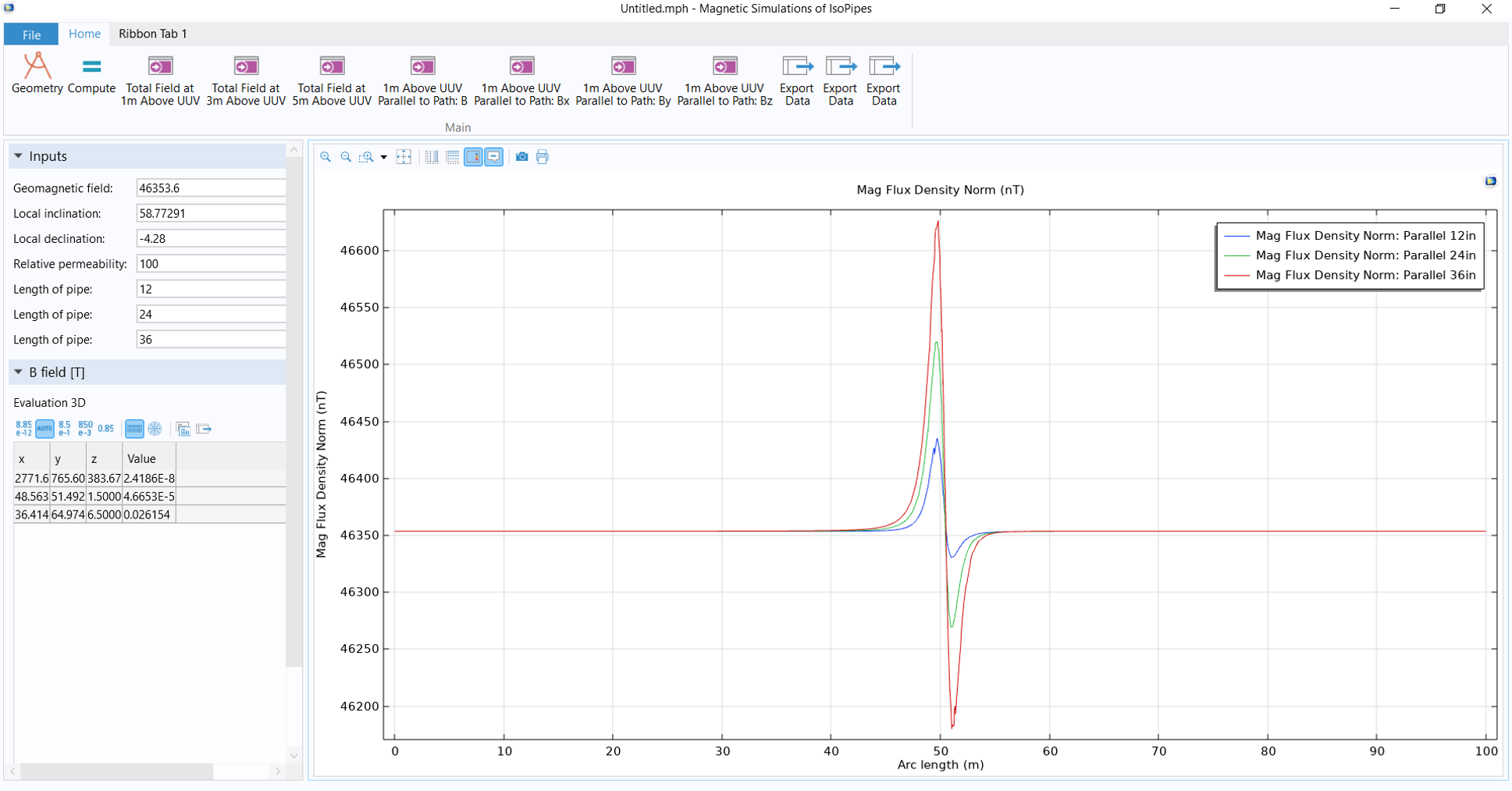
良好な結果が得られたことから, McKenna 博士は検証済みモデルを用いて, ML アルゴリズム用の膨大なトレーニングデータへのアクセスを必要とするデータサイエンスチーム向けのシミュレーションアプリ (図 6) を作成しました. McKenna 博士は COMSOL Multiphysics のアプリケーションビルダーを使用してアプリを作成しました. このアプリは使いやすく, 科学者が ML トレーニングデータを生成できます.
"いくつかの例に沿ってアプリを構築し, 1~2時間でアプリを稼働させることができました" と McKenna 博士は述べています. "様々なパラメーターを入力し, それらを変更すると磁力線が変化します. まさに私たちが求めていたものです."
データサイエンスチームは, モデルがこれらのデータポイントを捕捉できることを確認する必要がありますが, COMSOL® を使用することで, モデルを常に監視することなくそれを実現することができました. データサイエンスチームはパラメーターを変化させ, UUV が遭遇, スキャンすると予想される様々なシグネチャーを開発できます. シミュレーションアプリは, USM にアルゴリズムを適切にトレーニングするために必要な質と量のデータを提供しました.
これらのアプリを使用することで, USM は研究作業を分担し, 各チームが専門知識を活かせるようにすることができました. "全員がそれぞれの専門分野で生産性を発揮することができました" と McKenna 博士は述べています. "このようなことを行うにはチームワークが必要です."
機械学習技術
チームが使用した機械学習技術には, 長短期記憶 (LSTM) ネットワーク, 回帰分析, ツリーブースティング, ディープニューラルネットワーク (DNN) モデルなどが含まれます.
LSTM モデルは, シミュレートされたセンサーシーケンスデータ上で実行した場合に予測能力がどのように変化するかを評価するために使用されました. この評価は, さらに, シミュレーションが観測データのデータ拡張に効果的に使用できるかどうかを判断するために使用できます. 回帰, ツリーブースティング, および DNN モデルは, シミュレーションデータパターンの確認のために選択されました.
これらのモデルはシミュレートされたデータでのみ実行され, LSTM モデルは合計50万を超えるデータポイントから10個のデータポイントの埋め込みシーケンスを使用して実行されました. これらのモデルは, 時系列分析を含むシーケンスデータと互換性があるため, UUV 統合センサーデータの解釈に特に有用です.
COMSOL カンファレンスの McKenna 博士の発表 (文献 1) で説明されているように, "COMSOL モデルから生成された合成データセットは, 多様なトレーニング例を提供し, ML モデルが複雑な時間的関係とシグネチャーパターンを学習することを可能にします."
インテリジェント UUV の将来展望
河川, 湖沼, 水路の底には, 安全と航行のために記録されるべき強磁性構造物や装置が存在します. UUV は, これらの潜在的な危険箇所をマークし, 港湾の航行性を向上させる航海図の精度向上に重要な役割を果たします. 例えば, 自然災害で船舶が沈没し, 想定外の場所に残骸が残された場合, スマート UUV は海底を迅速にスキャンし, 波の下に何があるのかについての洞察を提供することができます.
USM の研究チームは, シミュレーションと機械学習の融合により, UUV の予測能力を向上させることに取り組んでいます. McKenna 博士が “シミュレーション駆動型の機械学習を地球物理や工学の幅広い分野に取り入れるための指針” と考えているこのプロジェクトも, まだ道のりのほんの始まりにすぎません. 彼の将来の目標は, モデルにさらなる複雑さを加え, まだ考慮されていない現象に焦点を当てることです. これには, より大きな強磁性体の自己消磁や, 音響現象や熱現象などの物理学の組み込みが含まれます. また, McKenna 博士は COMSOL Server™ を通じて機械学習のトレーニング用にアプリを内部展開し, よりリアルな海底モデルの開発, USM における不確実性定量化最適化の活用をさらに進めたいと考えています.
謝辞
この研究は, USM が海軍研究局から受けた助成金によって支援されました.
参考文献
- J. McKenna et al., "Potential Fields Modeling to Support Machine Learning Applications in Maritime Environments," COMSOL Conference 2024 Boston, 2024; https://www.comsol.com/paper/potential-fields-modeling-to-support-machine-learning-applications-in-maritime-environments-135922