
レーザーは現代科学で最も有用な発明の1つですが, 使いやすいデバイスではありません. レーザーは, キャビティミラーが完全に位置合わせされている場合にのみ機能します. レーザーがしばらくレーザー発振していても, 突然停止することもあります. 今日のブログでは, COMSOL Multiphysics® ソフトウェアの光線追跡機能を使用してレーザーの安定性を予測する方法についてご説明します.
レーザーシミュレーション入門
Albert Einstein が誘導放出を発見したのは1916年ですが, レーザーは1957年にC.H. Townes, A.L. Schawlow, or G. Gould の3人のアメリカ人科学者のいずれかが発明したと推定されています. (誰が最初に理論的にレーザーを発明したかについては, 特許戦争があり, 誰が最初にアイデアを思いついたのかについては, 今でも論争が続いています.) 最初のレーザーは, 1960年にTheodore Maiman によって製造されました.
レーザーは, 切断, 穿孔, 溶融, アブレーション, 電気通信, 測定, 分光法など, 多くのアプリケーションで非常に役立ちます. 1960年代に入ると, A.G. Fox, T. Li, H. Kogelnikらは, 光学の近軸理論に基づいて, 電場分布を計算し, ガウシアンビームを定式化し, レーザーの安定性を予測する方法を考案し, レーザーの研究をさらに進展させました. これらの理論は, 60年後の現在でも, レーザーの取り扱いと設計の基礎となっています.
これらの理論の中でも, 特にレーザー工学に役立つのがKogelnikのレーザー安定性理論です. この理論は2つの部分から構成されています.
- レーザー共振器内でどのようなガウシアンビームが発生するかを予測する近軸光学理論
- レーザービームが空洞の中で安定している条件を予測する幾何光学理論
レーザーは, 電源を入れたり, 強く励起したりすると, 動作を停止する場合があります. これは, 熱レンズ効果によるものです. レーザー結晶は, 反転分布を引き起こすために, 別の1つまたは複数の光源によって励起されます. このプロセスは, 誘導放出を誘発するのに使用されない励起光の残留エネルギーによって望ましくない熱を生成してしまいます. この熱は, 屈折率に望ましくない変化をもたらし, 結晶表面の膨らみを引き起こすのです.
Kogelnikの理論は, 結晶内の温度分布に放物線を当てはめることによって熱レンズ効果を近似するロッドレンズを含むレーザーキャビティを対象としています.
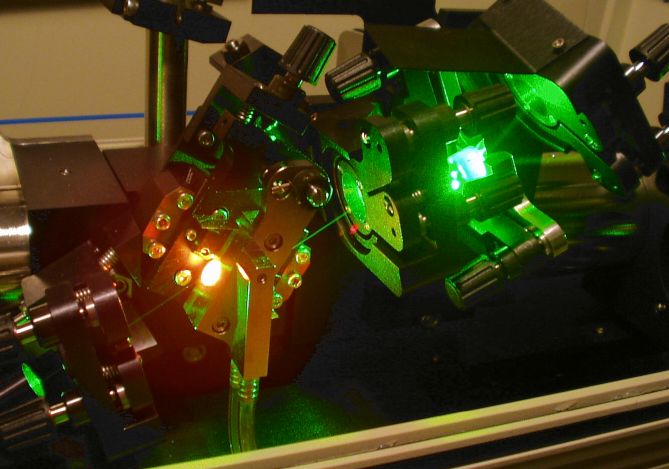
チタンをドープしたサファイアフェムト秒レーザー. Arレーザーからの緑色レーザーは, 反転分布のためにオレンジ色のグレアを放出するチタン・サファイア結晶を励起するために使用されます. レーザー結晶は円形の棒ですが, ブリュースターカットと呼ばれる角度でカットされています. 励起ビームは, 望ましくないフレネル反射を回避するために, ブリュースター角で結晶表面に入れられます. Hankwangによる画像. 自身の画像. Wikimedia Commonsを介して, CC BY-SA 3.0でライセンス供与.
レーザーの安定性を解析する方法
Kogelnik の理論の安定性についての部分の考え方は非常に単純です. レーザーキャビティミラー間で前後に跳ね返る光線が, 特定の往復回数の後にキャビティから逃げてしまわない場合, レーザービームは安定していると言えます. この理論は, 実際の光線追跡ではなく近軸光学に基づくABCD行列理論を使用して, より簡潔で体系的な方法で開発されました.
この理論では, 熱レンズは特定の焦点距離を持つ薄いレンズとしてモデル化されます. 焦点距離は, レーザー結晶の温度分布に放物線を当てはめることによって計算されます. したがって, ABCD行列理論と放物線フィッティング法は簡単に実行でき, 美しい結果を出してくれるのです. 必要なのは, 光学系の距離, 関係するレンズの焦点距離, およびミラーの曲率半径だけです.
すべての折返しミラーは, 透過焦点距離を持つレンズに置き換えられ, 熱レンズ効果は, ワット単位の励起パワーではなく, 近似焦点距離で置き換えられます. 光学系を傾けることはできず, 光学系のレイアウトは直線で1Dに平坦化されます.
この方法は, より複雑で実用的なレーザーキャビティを扱うには単純すぎます. 結果を3Dで表示したい場合, または安定性解析にプリズムを追加したい場合はどうなるのでしょう? ミラーでレーザービームを折返したり, 光学系の1つを傾けたりしたい場合は? 近似焦点距離ではなく, ワット単位で励起パワーを与えるにはどうすれば良いのでしょう? また, 制限や近似なしで光線追跡と熱解析を実行したくはないでしょうか?
すべてのレーザーはポンプレーザーにより励起されるため, 熱レンズ効果を考慮せずにレーザー安定性解析を実行することはほとんど役に立ちません. そのため, 安定性解析のセットとして熱解析が必要です. これは光線追跡から分離することはできません. COMSOL Multiphysics の伝熱インターフェースと幾何光学インターフェースを組み合わせることで, 必要なすべてのツールを手に入れることができます.
COMSOL Multiphysics® で共焦点キャビティのレーザーを解析
レーザーキャビティの簡単なサンプルモデルを見て, ABCDマトリックス法がどのように機能し, COMSOL Multiphysics の結果とどのように一致するかを簡単にご説明しましょう. このセクションは, Kogelnik 自身の研究論文の1つを補足するものです(参照1). ABCD行列法では, Hecht の著書で用いられているのと同じ表記(参照2)に従い, 光線は2×1列ベクトルの光線角度θと光線位置yによって次のように特徴付けられます.
\begin{array}{c}
\theta \\
y
\end{array}
\right ]
伝搬, 屈折, 反射, 集束, およびデフォーカスを含むすべての光学プロセスは, 光線伝達行列と呼ばれる2×2行列で表されます.
たとえば, 距離 Lの伝搬は, 次の2×2行列で表されます.
\begin{array}{cc}
1 & 0 \\
L & 1
\end{array}
\right ]
また, 空気中の曲率半径Rのミラーでの反射は, 次のように表すことができます.
\begin{array}{cc}
-1 & -2/R \\
0 & 1
\end{array}
\right ]
この例のレーザーキャビティには, 曲率半径R = 0.1 m, キャビティ長L = R/2 = 0.05 mの同一のミラーのペアがあります. このキャビティは下の図の通りで, 共焦点キャビティと呼ばれます.
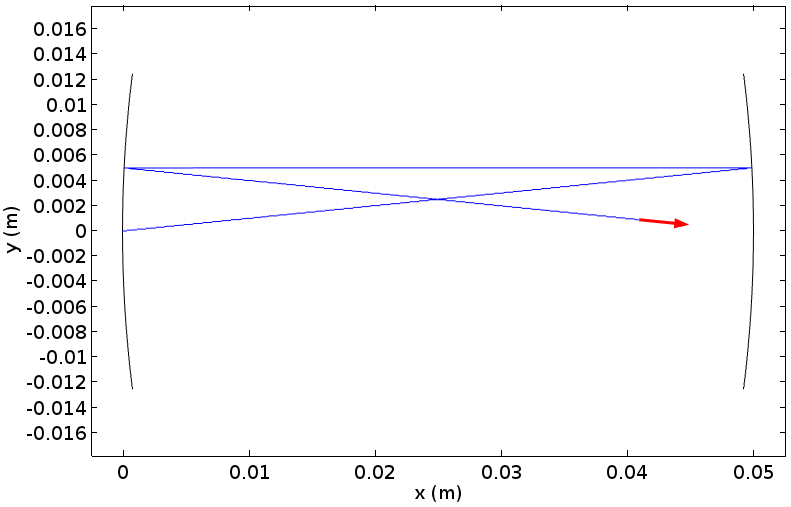
数回のバウンス後の共焦点キャビティのCOMSOL Multiphysicsでの光線追跡.
初期光線の角度と位置として, θ0 = 0.1 rad および y0 = 0.01 m と設定しましょう. (ABCD行列法の場合, x位置はさほど重要ではありませんが, 初期光線をx = 0 m; i.e., つまり左ミラーの中心に設定しましょう. ) ABCD行列法は, キャビティ長を伝播した後の次の角度と光線の位置が次のように計算されることを示してくれています.
\begin{array}{c}
\theta_1 \\
y_1
\end{array}
\right ]
=
\left [
\begin{array}{cc}
1 & 0 \\
0.05 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0.1 \\
0
\end{array}
\right ]
=
\left [
\begin{array}{c}
0.1 \\
0.005
\end{array}
\right ].
これは, 右側のミラー上の光線の角度と位置です(反射される前). 反射後, 次の光線の角度と位置はまだ右側のミラー上にありますが, 左側に向かっています. それらは次のように計算されます.
\begin{array}{c}
\theta_2 \\
y_2
\end{array}
\right ]
=
\left [
\begin{array}{cc}
-1 & +20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0.1 \\
0.005
\end{array}
\right ]
=
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ].
次に, キャビティ長をもう一度移動すると, 光線は次のように元の左ミラーに戻ります.
\begin{array}{c}
\theta_3 \\
y_3
\end{array}
\right ]
=
\left [
\begin{array}{cc}
1 & 0 \\
-0.05 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ]
=
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ].
最後に, 1回の往復の終わりは, 左側のミラーによる反射です.
\begin{array}{c}
\theta_4 \\
y_4
\end{array}
\right ]
=
\left [
\begin{array}{cc}
-1 & -20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ]
=
\left [
\begin{array}{c}
-0.1 \\
0.005
\end{array}
\right ],
これは上の図で確認していただけます.
この方法の美しさは, 行列演算だけで光線の動作を知ることができるというところにあります. 光線の伝播と反射のシーケンスを表す行列Mは, 次のように計算できます.
\left [
\begin{array}{cc}
-1 & -20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{cc}
1 & 0 \\
-0.05 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{cc}
-1 & +20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{cc}
1 & 0 \\
0.05 & 1 \\
\end{array}
\right ]
=
\left [
\begin{array}{cc}
-1 & -20 \\
0.05 & 0 \\
\end{array}
\right ],
これにより, 前の結果と同じ結果が得られます.
\begin{array}{c}
\theta_4 \\
y_4
\end{array}
\right ] =
\left [
\begin{array}{cc}
-1 & -20 \\
0.05 & 0 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0.1 \\
0
\end{array}
\right ]
=
\left [
\begin{array}{c}
-0.1 \\
0.005
\end{array}
\right ].
この伝達行列Mには, M3 = I; i.eという特性があります. つまり, 3回のラウンドトリップ後に同じ行列になるということです. 実際, これは, 行列積を計算せずに, Sylvester の定理によって解析的に証明できます.
\begin{array}{cc}
A & B \\
C & D \\
\end{array}
\right ]^n
=
\frac{1}{\sin \Theta}
\left [
\begin{array}{cc}
A \sin n\Theta – \sin(n-1)\Theta & B \sin n\Theta \\
C \sin n\Theta & D \sin n\Theta – \sin(n-1) \Theta
\end{array}
\right ],
ここで, \cos \Theta = (A+D)/2.
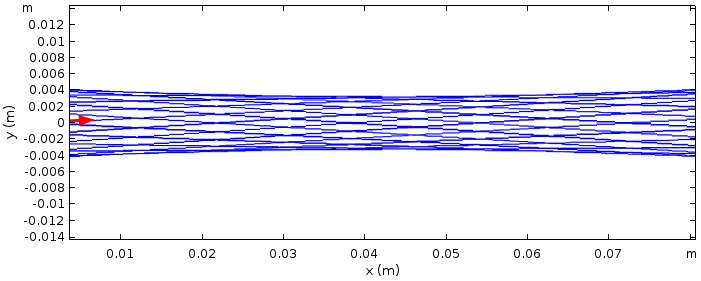
上記の式のM行列にn = 3 を代入すると, M3 = Iが得られます. これは, 次の図の光線追跡で確認でき, ここでは光線奇跡が往復の数によって色分けされています.
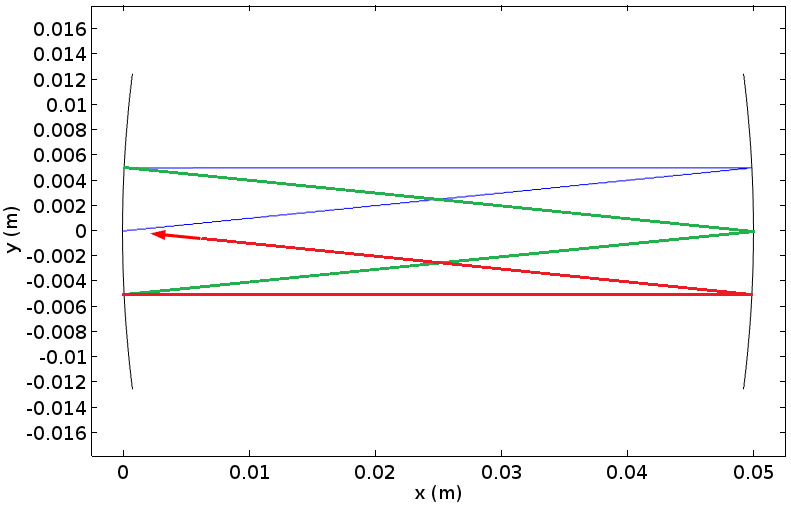
前のプロットと同じ共焦点キャビティの光線追跡結果. 光線が3回往復後に初期位置に戻っていることを示しています.
この場合, このキャビティは安定していると言われます. つまり, このキャビティ内の光線はそこから逃げません. 上記の式は, -1 \le (A+D)/2 \le 1という行列のトレースが当てはまる場合に, この行列によって表されるシーケンスが安定しているという一般的な結果を導き出すのに特に役立ちます. この場合, トレースは(A+D)/2 = -1/2と計算されます. よって, それは安定していると言えます.
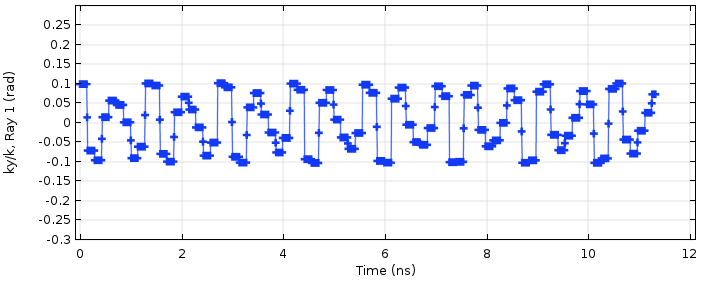
下の図のように, 単位波数ベクトルのy成分をプロットして結果を表示することもできます. プロットは, 光線の方向が定期的に変化するが, 成長することはなく, 3回往復後に同じ値に戻ることを示しています. 大まかに言えば, 光線がキャビティ内に入る上限と下限は±0.15ラジアンであり, 以下のプロットはこれを証明しています.
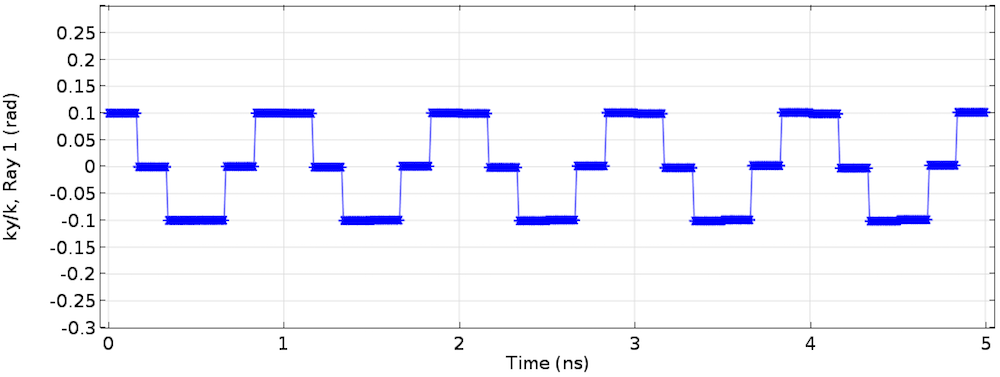
単位波数ベクトルの y成分. 光線の方向は有限の最小値と最大値によって制限されます. これにより, 光線はキャビティミラーを超えて発散しません.
レーザーのキャビティ長の変更
別の例を見てみましょう. キャビティ長をL=R\left(1-\sqrt{1+\cos(9 \pi/10)/2} \right)=0.084357mとします. このキャビティは, 共焦点キャビティから少し離れています. この意図的に調整されたキャビティ長は, 式で \sin(20\Theta)=0と\sin(19\Theta)=-\sin(\Theta)が成立することを保証します. したがって, 伝達行列は20回の往復後に同一の行列になり, 初期光線の角度と位置が取得されます. この場合の伝達行列は次のとおりです.
\begin{array}{cc}
-1.215 & -6.2574 \\
0.026393 & -0.68713 \\
\end{array}
\right ]
この伝達行列の20回の積は, M20 = Iになります. 次の図の光線追跡でこれを確認しましょう. 赤い矢印は確かに元のミラーの中心に戻り, 元の方向を指しています.
同じミラーを使用し, 20回往復後のキャビティ長が少し長いレーザーキャビティの光線追跡結果.
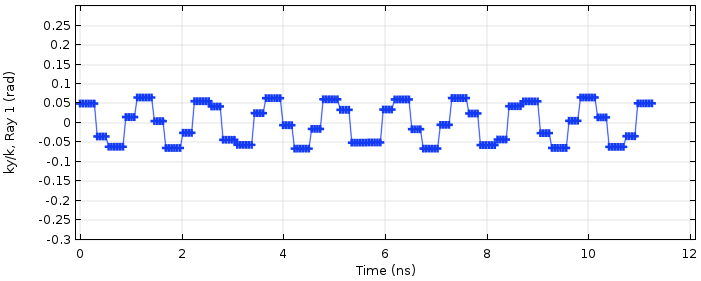
単位波数ベクトルの y成分.
一般に, 曲率半径R1の右ミラー, R2の左ミラー, および1往復のキャビティ長Lの伝達行列は次のように記述されます.
\begin{array}{cc}
\left( -1+\frac{2L}{R_1} \right) \left( -1+\frac{2L}{R_2} \right) – \frac{2L}{R_2}
&
\frac{2}{R_1} \! \! \left( -1+\frac{2L}{R_2} \right) – \frac{2}{R_2}
\\
\left( -1+\frac{2L}{R_1} \right)(-L)+L
&
-\frac{2L}{R_1}+1
\\
\end{array}
\right ].
いくつかの簡単な計算により, 上記の行列のトレースから導出された安定条件は次のように表されます.
この安定性の公式は, キャビティにレンズが含まれる場合にさらに拡張されます. キャビティ内にレンズを導入すると, 伝達行列が複雑になり, ここでは簡単に書けませんが, 安定性の基準は変わらず簡単です. 焦点距離fのレンズを追加すると, 次のように変更されます.
ここで, L0 = L1 + L2 – L1L2/f and L1およびL2は, それぞれレンズから左右のミラーまでの距離です. 前のキャビティに焦点距離f = 50 mmの集束レンズを追加してみましょう. 安定性条件数は0.10978で, キャビティが安定していると予測しています.
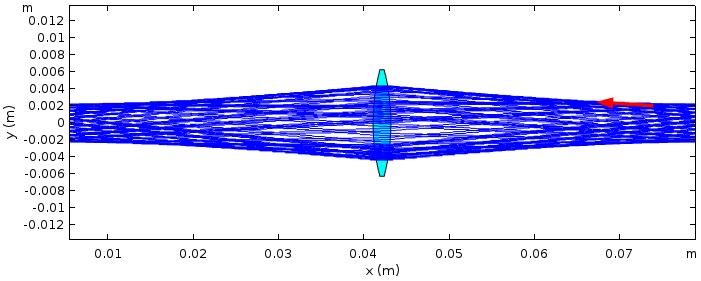
薄いレンズが追加された, 前のキャビティの光線追跡結果.
単位波数ベクトルの y成分.
これまで, COMSOL Multiphysics の光線追跡機能と並行してABCD法を使用したいくつかの基本的なレーザーキャビティ安定性解析を見てきました. 両方のアプローチによる安定性の結果はよく一致しています.
焦点距離が異なるレーザーのシミュレーション
ここで, 最後の例に移りましょう. この例では, 前の例の焦点距離がパラメーター化されて変化し, キャビティの安定性の変化が有名な安定性チャートにプロットされています. Kogelnik の理論では, 安定条件の式は次のように書き直されます.
ここで, g1 = 1 – L2/f – L0/R1およびg2 = 1 – L1/f – L0/R2.
次の有名な安定性チャートでは, 安定領域がハッチングされた領域としてプロットされています. 横軸はg1, 縦軸はg2です. 元のキャビティパラメーターR1, R2およびL0によって導出されたg1および g2がハッチング領域内にある場合, レーザーキャビティはKogelnik の理論に従って安定しています. 前の例では, 2つのミラーに同じ曲率半径を使用しました. したがって, 対称性からR1 = R2したがってL1 = L2 = L0/2となり, 結果としてg1 = g2になります. これは45度の線です. キャビティパラメーターが変化すると, g1とg2の値は, 第1象限と第3象限を通る線に沿って変化します.
これがどのように可視化されるかを見てみましょう. レンズの焦点距離を5mm刻みで15mmから40mmに変えながら, ミラーの曲率を0.1m, キャビティ長を0.084357mに固定します. 次の図は, レンズを備えたこの特定のレーザー共振器に対するKogelnik の理論的結果を示しています. レーザーはf = 25, 30, 35, および40 mmで安定しており, それぞれg1g2 = 0.67091, 0.43100, 0.29200, および0.20545になります.
これらの値はハッチングされた領域にプロットされていますが, 焦点距離が15mm と20mmの場合, g1g2値が1.0を超えると, このレーザーは不安定になります (それぞれ1.1299と2.1593). このレーザーキャビティの理論的予測は, 次の図にプロットされています. 各焦点距離の光線追跡結果は, 理論と完全に一致することを示す図の側面に表示されています. COMSOL 計算では, 光線がキャビティから出ると, 組み込みの停止条件によって計算が終了します. 実際の計算時間Tと事前設定された計算時間T0(この場合は50 ns)の比率, T/T0は, T0が適切に選択されている場合のキャビティの安定性を表します. 1.0以外のこの安定性指数の値はあまり意味がないかもしれません. 実際のレーザーは不安定になるとすぐにオフになる, つまり, レーザーの安定性の変化はほぼデジタルで, 1(オン)または0(オフ)ということが分かっているからです.

Kogelnik の安定性理論と, 薄いレンズを備えた非共焦点キャビティの COMSOL Multiphysics 光線追跡の結果との比較.
この最後の例は, 光線追跡が熱レンズ効果を考慮したレーザーキャビティ安定性解析を実行できることを示しています. これは, この例が熱レンズを備えたレーザーキャビティのKogelnik のモデルであるためです. Kogelnik の理論では, ポンプレーザーによって加熱されたレーザー結晶は, 特定の焦点距離を持つ薄いレンズに置き換えられます. 結晶内部の温度分布がわかれば, 屈折率分布はn = n0 + (T – T0)dn/dTから1次近似まで計算されます. ここで, n, n0はポンピングがある場合とない場合の屈折率分布, T, T0は, ポンピングがある場合とない場合の温度分布, dn/dTは, 温度依存屈折率変化係数です.
励起されたレーザー結晶の屈折率分布は, 結晶がロッドの場合, 中心の周りでほぼ放物線状になります. 例として, n(r) = n0(1 – 2r2/a2)を見ると, ここでrは, z軸がポンピングの光軸に沿った極座標系の半径距離です. 計算された屈折率分布がこの放物線に当てはめられ, フィッティングパラメータaが取得されます. このパラメータが計算されると, 熱レンズ効果を表す焦点距離はf ~ a2/(4n0L)で近似できます. ここで, Lは結晶長です(参照3). 熱レンズには, 屈折角の変化を引き起こす表面の膨らみも含まれ, これは同様の方法で解析できます.
おわりに
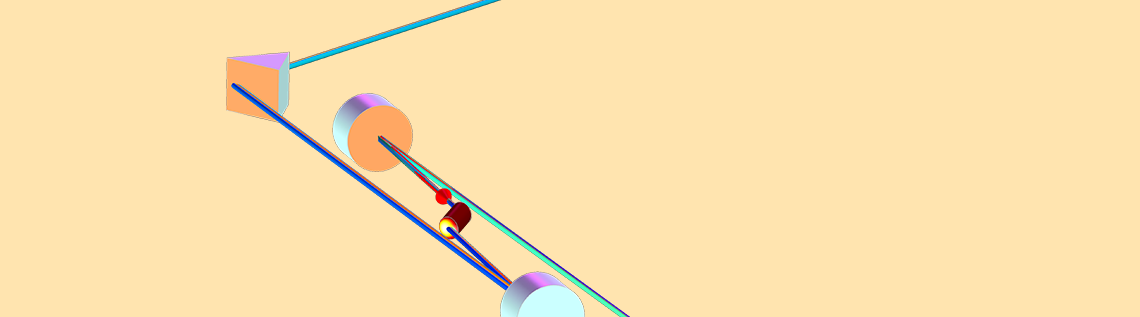
COMSOL Multiphysics を使用すると, フィッティングを行う必要がありません. 伝熱および固体力学インターフェースを使用して熱および機械シミュレーションを実行し, 新しい屈折率分布と表面の膨らみを確認してから, 光線光学のインターフェースを使って光線追跡を行い, 熱レンズ効果の下でのレーザーキャビティの安定性を確認するだけです. COMSOL Multiphysics の光線追跡機能については, 今後のブログでさらにご説明します. ここでは, ダブルポンプブリュースターカット結晶と1対の分散補償プリズムを備えたチタン・サファイアレーザーキャビティの安定性を解析する本格的なモデルを示しています. 乞うご期待!
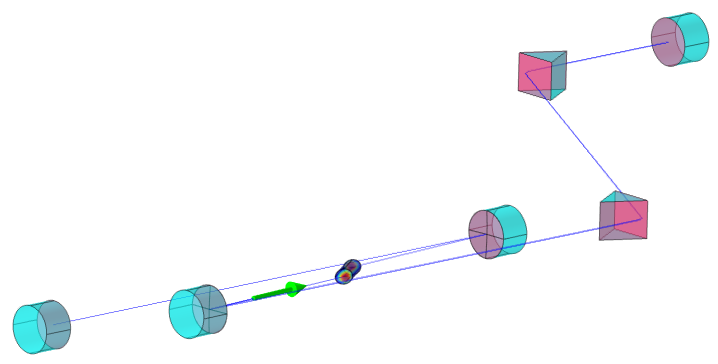
温度, 機械的変位, 光線の位置と角度を求めるチタン・サファイアレーザーキャビティの安定性解析モデル.
参考文献
- H. Kogelnik and T. Li, Applied Optics, Vol. 5, No. 10 (1966)
- E. Hecht, Optics, Addison Wesley
- W. Koechner, Solid-State Laser Engineering, Springer
他のリソース
- これらのレーザーキャビティチュートリアルモデルをご参照ください.
- レーザーシミュレーションについての詳細はCOMSOL Blog で:

コメント (0)