
自動運転車は長らく SF の定番でしたが, SF 作家が夢想する他の発明とは異なり, 完全自動運転車は過去10年間で驚くほど現実に近づいてきました. このブログでは, COMSOL Multiphysics® ソフトウェアを用いて, 自動運転車や自律ロボットが周囲の状況を認識するための重要な技術である LIDAR をモデル化する方法について学びます.
完全自動運転車への道
車両の自律性を評価する業界標準は, 米国自動車技術者協会 (SAE) によって策定されました. SAE の自動化レベルは6段階 (レベル 0 から始まる) に分かれており, 機械が実行できる動的運転タスク (DDT) と人間の介入が必要なタスクに基づいて分類されています:
- レベル 0: 自動運転なし. 人間のドライバーが車両のすべての DDT を実行する.
- レベル 1: ステアリングまたは加減速のいずれかの自動支援 (例: クルーズコントロール). 車両のその他の DDT は, 人間のドライバーが実行する.
- レベル 2: ステアリングと加減速の自動支援 (例: 自動縦列駐車). その他の DDT は, 人間のドライバーが実行する.
- レベル 3: 車両の DDT は自動化される. 人間のドライバーは車両を注意深く監視し, 必要に応じて介入する.
- レベル 4: 車両の DDT は自動化される. 人間のドライバーは介入する必要はない.
- レベル 5: DDT が完全に自動化される. 人間のドライバーは助手席に乗る必要はない.
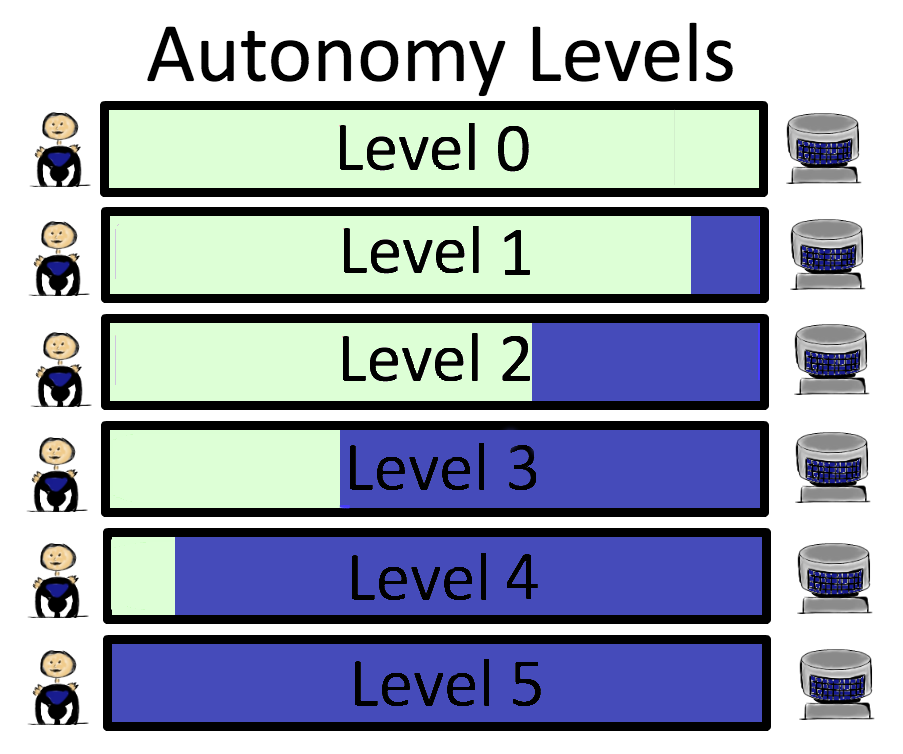 SAE が規定する自動運転の6つのレベルを示す図.
SAE が規定する自動運転の6つのレベルを示す図.
レベル 2 とレベル 3 の間では, 分類システムに重要な変化が起こります. これは, ほとんどの DDT を担う車両の主たるコントローラーが, 人間のドライバーから自動運転車両システムに移行する点です. 現在までに, 一部の自動運転車は SAE レベル 4 を達成していますが, レベル 5 の完全な自律性を達成した車はまだありません.
 レベル 5 の運転体験を描いた漫画イラスト.
レベル 5 の運転体験を描いた漫画イラスト.
完全自動運転が実現するまでには, まだ乗り越えるべき課題が残っています. 自動運転分野における重要な設計課題の一つは, 光による検知と測距 (LiDAR) システムの最適化です. LiDAR はソナーやレーダーと同様に機能しますが, 音波や電波ではなく光を利用します. LiDAR の活用により, 自動運転車やその他の自律ロボットは周囲の状況を3次元的に認識できるようになります. LiDAR は, 考古学や林業など, 地形測量が必要な業界でも多くの用途があります.
LiDAR の仕組み
LiDAR の動作原理は, 一見するとシンプルです. 特定の方向に強く細いビームを照射し, 光源の近くに設置された受信機に後方散乱が到達するまでの時間 (飛行時間) を測定します. そして, その時間から散乱面までの距離を計算します. このプロセスを様々なビーム角度で繰り返し, データを集計します. その結果, 周囲の画像が得られます. ただし, 各ピクセルは一般的な画像のように色ではなく, 奥行きを数値化します.
ここでは, 飛行時間 t を距離 d に変換するのに必要なのは, たった一つの簡単な式だけです. 光が一定の屈折率 n を持つ媒質中を伝播すると仮定すると以下のようになります:
ここで, c_0 は真空中の光速です. 以下のアプリケーションでは, 空気中の LiDAR を想定しているため, n=1 と設定します.
 車両のルーフに取り付けられたライダーユニットの例. 画像は Arno Mikkor 氏によるものです. CC BY 2.0 ライセンスに基づき, Flickr Creative Commons から提供されています.
車両のルーフに取り付けられたライダーユニットの例. 画像は Arno Mikkor 氏によるものです. CC BY 2.0 ライセンスに基づき, Flickr Creative Commons から提供されています.
しかし, 機能的な LiDAR システムには, いくつかの実用的な考慮事項があります:
- パルスレーザーは, 細いビームで高速スキャンを可能にする光源として当然の選択ですが, 目の安全性にも注意が必要です. 直接照射されても目の損傷のリスクがないため, 通常は 1550 nm 前後の波長が好まれます.
- 正確なスキャンを可能にするには, ビーム角度を正確に制御できる必要があります. これは, 例えば MEMS ミラーを使用することで実現できます.
- 波長が長く, 目に安全な光は, 光子のエネルギーが低いため, 効率的に検出するのが難しい場合があります. 一般的な選択肢は, 前段増幅されたアバランシェフォトダイオードまたは PIN フォトダイオードです.
LiDAR は基本的にレーダーやソナーと同様の仕組みですが, これらの旧来の技術と比較すると, LiDAR にはいくつかの重要な利点があります. 例えば, LiDAR が使用する光の波長 (通常 1550 nm 程度) は, レーダーが使用する電波やソナーの音波よりもはるかに短いため, 解像度に優れています. さらに, 空気中で光よりもはるかに強く減衰する音波に比べて, LiDAR はより長い距離を測ることができます. ソナーは一般的に水中でのみ使用され, 水中での減衰ははるかに弱くなります. 最後に, 空気中の光速は音速よりも温度や圧力の変化の影響を受けにくいため, LiDAR で取得した距離はソナーよりも正確です.
LiDAR には考慮すべき制約もいくつかあります. レーダーやソナーとは異なり, LiDAR はドップラー効果を利用して物体の速度情報を取得できないため, 距離の変化率から速度を推定するには十分に高いリフレッシュレートが必要です. また, 透明または鏡面のような表面は光の後方散乱がほとんどないため, LiDAR による検出が困難です.
光線光学モジュールによる LiDAR のモデリング
COMSOL Multiphysics® の時間領域光線追跡アルゴリズムは, LiDAR モデリングに最適です. 従来の幾何学的光線追跡法と比較して, 各光線の実際の到達時間を取得することで, より正確な LiDAR シミュレーションが可能になります. これは下の図に示されています. 光線光学モジュールの詳細については, こちらのブログ をご覧ください. 交差点で障害物を検知する自動車と, 部屋のレイアウトをマッピングするロボット掃除機という, 2つの LiDAR モデルを見てみましょう. どちらのモデルでも, LiDAR ユニットは, 出射機能 (光源) とアキュムレーター (検出器) のペアとして単純に実装されています.
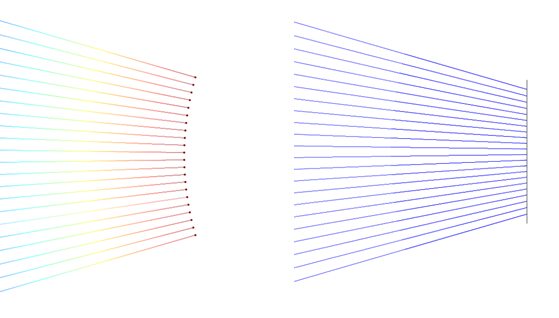 COMSOL Multiphysics® の時間依存光線追跡 (左) と標準的なシーケンシャル平面間光線追跡 (右) の違いを示す図.
COMSOL Multiphysics® の時間依存光線追跡 (左) と標準的なシーケンシャル平面間光線追跡 (右) の違いを示す図.
LiDAR による障害物検知
このモデルは, 交差点で歩行者と別の車両を検知する LiDAR ユニットを搭載した車両で構成されています. 光線追跡のアニメーションと, 3つの前方検出器における時間依存信号のプロットを以下に示します. ここでは1回の検知サイクルのみを考慮しており, 実際にはこのプロセスが1秒間に数回繰り返されることに注意してください.
車両 LiDAR モデルの光線追跡結果のアニメーション.
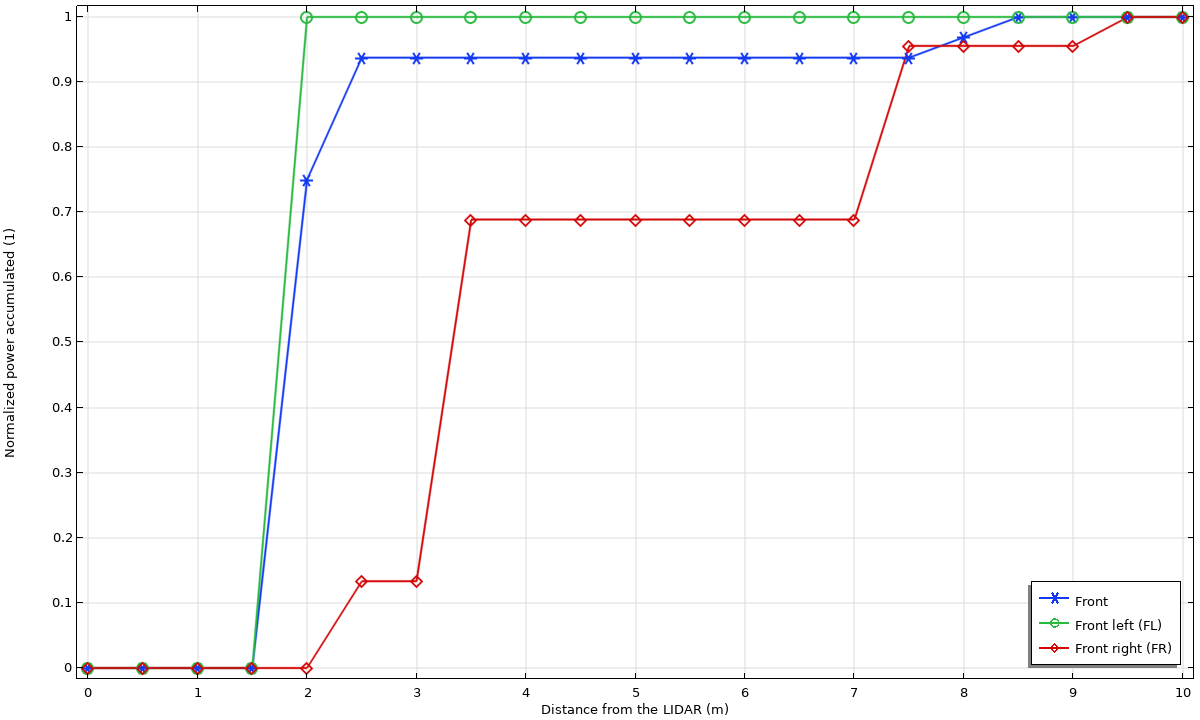 3つの前方検出器で検出された信号を示すプロット. 前方と前方左の検出器は 2 m でピークに達し, 歩行者を検知しています. 前方右の検出器は 7.5 m でピークに達し, 別の車両を検知しています.
3つの前方検出器で検出された信号を示すプロット. 前方と前方左の検出器は 2 m でピークに達し, 歩行者を検知しています. 前方右の検出器は 7.5 m でピークに達し, 別の車両を検知しています.
LiDAR による部屋のスキャン
2つ目のサンプルモデルは, 回転するライダーユニットを搭載したロボット掃除機が部屋をスキャンする様子を示しています. 下の図では, 飛行時間と回転角度のプロットから部屋のレイアウトを復元できることがわかります.
LiDAR の角度スイープによる光線の軌跡を示すアニメーション.
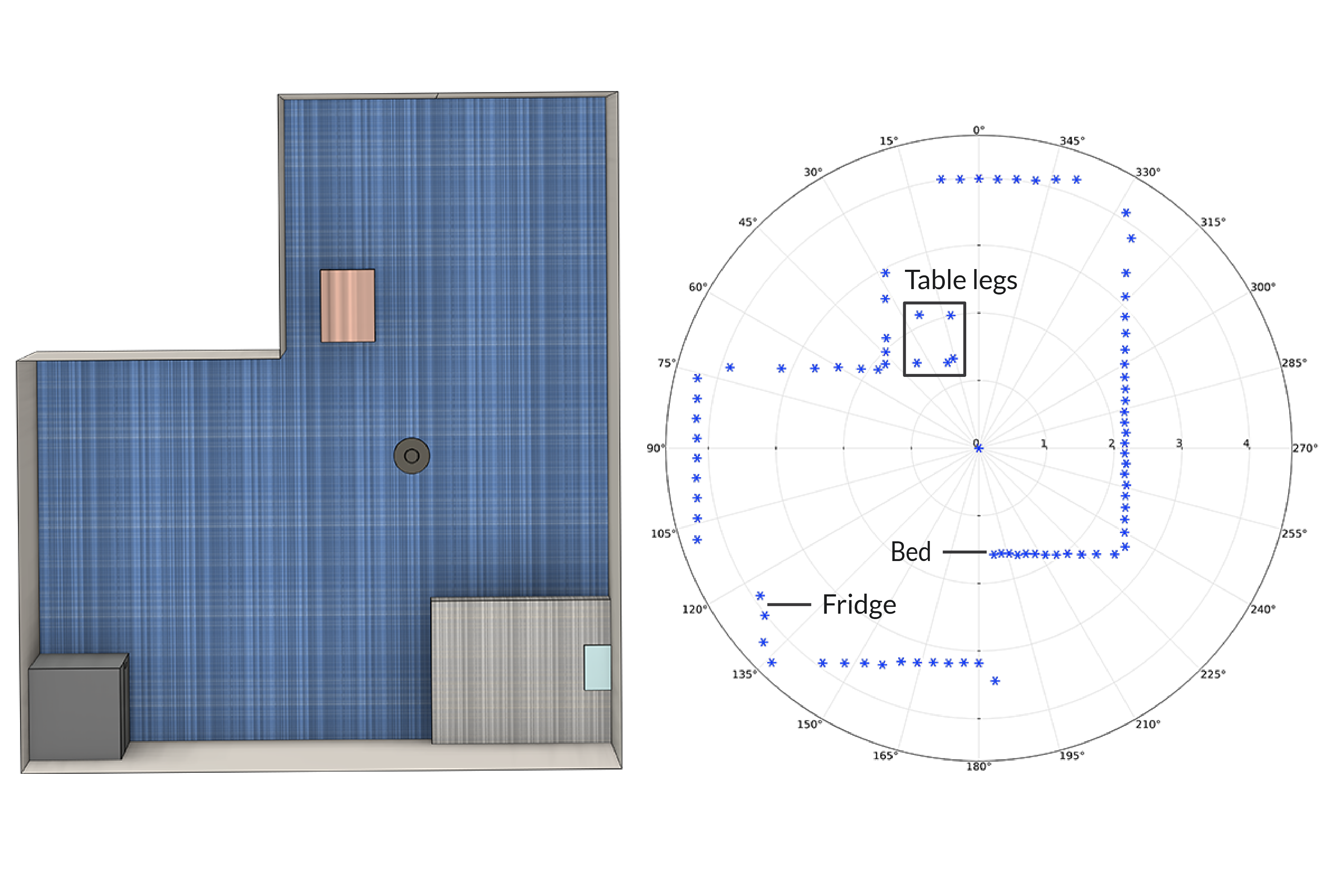
部屋のレイアウト (左) と LiDAR ユニットの角度に応じた飛行時間 (距離) の比較 (右).
次のステップ
ぜひご自身で LiDAR システムのモデリングをお試しください. アプリケーションギャラリから, ここで紹介する例のモデルファイルをダウンロードできます:
コメント (0)