多くの機械部品は振動の影響を受ける環境で動作します. 部品の固有周波数が低い場合, 共振が発生する可能性があります. これは, 自動車の軽度の騒音, 高精度製造における重大な欠陥, 土木工学における危険な故障など, さまざまな重大度の影響を与える可能性があります. このブログでは, 形状とトポロジ最適化を使用して最低固有周波数を最大化し, 共振の可能性を低減する方法を示します. COMSOL Multiphysics® ソフトウェアの組み込み機能を使用すると, 勾配ベースの最適化でこれらの問題を解決できます.
機械共振の概要
機械系がその周波数成分が系の固有振動数と一致する力によって励起されると, 機械的共振が発生し, 高振幅の振動が発生する可能性があります. この効果は(時計や楽器などで) 利用できますが, このブログでは, 機械の疲労問題や土木工学の故障の原因となる可能性がある不要な共振に焦点を当てます. 共振を軽減するには, アクティブまたはパッシブ防振システムを設置したり, 共振を引き起こす行動を避けるようにユーザーに指示したりするなど, いくつかの対策を講じることができます. たとえば, 下の画像に見られるように, ロンドンの有名な橋には, 兵士が橋を渡るときに歩幅を崩すよう指示する標識が設置されています. そうすれば, 彼らの行進の統一されたリズムが危険な機械的共鳴を引き起こすことはありません.
機械的共振を回避するためのもう 1 つの戦略は, 単純に最低固有振動数を増やすことです. ここでは, 最適化によってこれをどのように達成できるかを検討します.

ロンドンのアルバート橋には, 共振を避けるために橋の上で足並みを乱すよう兵士に指示する標識が設置されています. オリジナル画像は Colin Smith によるもので, ウィキメディア コモンズ経由で, CC BY-SA 2.0 に基づいてライセンス供与されています.
最適化概要
最適化アルゴリズムでは, 次のものを区別できます.
- 勾配なしの最適化. 最適化では目的と制約の値のみを使用して設計変数を更新します
- 勾配ベースの最適化. 最適化では, 設計変数の変更に対する目標と制約の影響度も認識します
勾配ベースの最適化では, 各反復でより多くの情報が得られるため, 特に多くの設計変数を伴う問題の場合, 大幅に高速になります. 速度の差異が非常に大きいため, 最初のアプローチは形状とトポロジの最適化のほとんどのアプリケーションでは実用的ではありません. COMSOL Multiphysics® は, ここにリストされている両方の最適化タイプをサポートしていますが, このブログでは勾配ベースの最適化に焦点を当てます.
以下の例では, 最小固有周波数を最大化することを目的としていますが, おそらく環境内で自然に発生している不要な周波数までの距離を最大化することもできます. 固有周波数の問題で繰り返し発生するのは, 構造に設計対称性が含まれていても, その固有モードが非対称である可能性があるということです. このため, 繰り返しのたびに構造全体をモデル化する必要があります. ただし, 初期設計が対称である場合は, 形状最適化またはトポロジ最適化インターフェースのミラー対称機能を使用してこれを維持できます.
形状最適化
最初の例は, 一端が固定されたシェルモデルです. 法線ベクトルの連続性は, トポロジ最適化に使用されるヘルムホルツフィルター, すなわち,
と同様に, 境界変形に偏微分方程式 (PDE) ベースの正則化 \mathbf{d} を使用することで保存されます.
ここで, d_\mathrm{max} は最大変位, L_\mathrm{min} はフィルター長, d_\mathrm{max}/L_\mathrm{min} は変形の最大勾配, \mathbf{c} は境界変形の制御変数場です. 固体の形状最適化を実行する場合, 内部要素の平滑化のための偏微分方程式もありますが, 実際にはすべてが形状最適化インターフェースの自由形状ドメイン, 自由形状境界, 自由形状シェル機能によって処理されます. これらの機能では, 勾配ベースの最適化のみが可能です. PDE ベースの形状正則化の代わりに, 多項式正則化手法を使用したり, 平行移動, 回転, スケーリングなどのジオメトリに単純な変更を加えたりすることもできます. (変換とスケーリングの詳細については, 電磁気学の形状最適化に関する 2 部構成のシリーズをご覧ください. ) 以下のアニメーションは, 設計の対称性を維持しながら PDE ベースの正則化を使用した結果を示します.
最適化履歴を通じてアニメーション化されたシェルの設計.
モード切り替えは, 常に最初の 6 つの固有周波数を解き, 移動漸近線 (MMA) 法を使用して最小固有周波数を最大化することによって処理されます.
次の例では固体ブラケットを考慮していますが, ブラケットのジオメトリはややシェル状であるため, ブラケットアームの厚さを維持するのが合理的です. これは, 一般押出しオペレーターと規定変形機能を組み合わせることで実現できます (詳細は, アプリケーションギャラリの ブラケット — 固有周波数形状の最適化 を参照) . それ以外の点では, 設定は対称性の目的と強化の点で以前のモデルと似ていますが, 初期設計はそれほど悪くないため, 改善はそれほど劇的ではありません (以下に示すように).
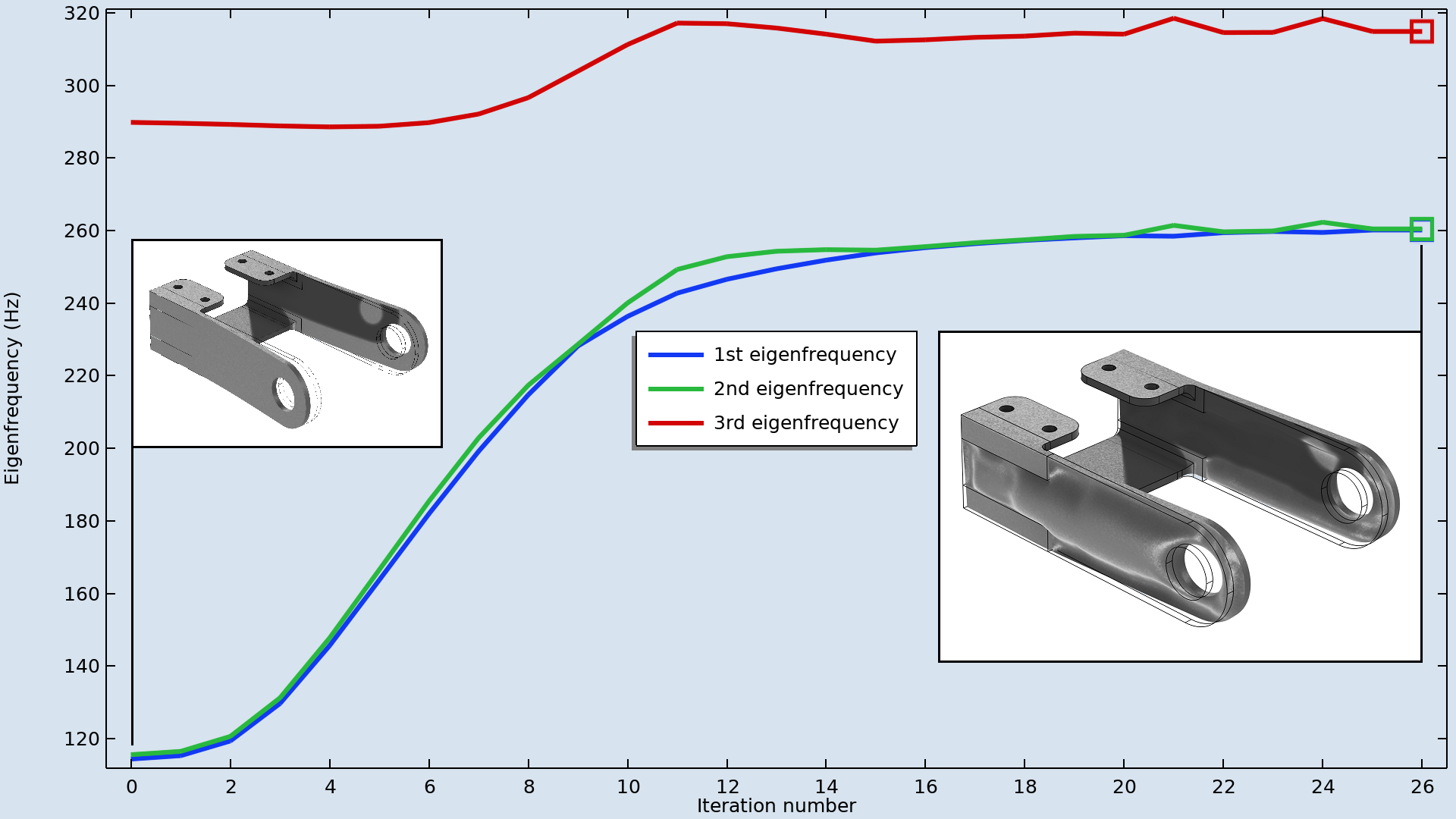 最適化履歴は挿入図で示されており, それぞれ第 1 固有モードと第 2 固有モードの初期ブラケットジオメトリと最適化されたブラケットジオメトリを示しています. ブラケットは4つの小さな穴で固定されています.
最適化履歴は挿入図で示されており, それぞれ第 1 固有モードと第 2 固有モードの初期ブラケットジオメトリと最適化されたブラケットジオメトリを示しています. ブラケットは4つの小さな穴で固定されています.
トポロジ最適化
勾配ベースの最適化は, トポロジ最適化を実行するとき, 特にソフトウェアでトポロジ最適化インターフェースを使用するときに利用することもできます. トポロジ最適化の詳細については, ブログ“密度法によるトポロジ最適化の実行”を参照してください. 基本的なアイデアは, 空間的に変化する設計変数場 \theta_c を導入することです. この場は, それぞれ空隙と固体材料に対応する 0 と 1 の間で制限されます. 構造力学では, 密度とヤング率 (剛性) をこの変数に依存させることができます. 最小の長さスケール L_\mathrm{min} で問題を正規化することが有利であるため, 依存関係は明示的ではありません. また, 密度 \rho を剛性 E とは異なる方法で補間して, 中間値が発生しないようにする必要があります. 剛性重量比が優れているため, 設計変数が最適化された設計を支配することはありません. 設計変数場と材料特性の関係は次の式で与えられます.
ここで, \theta_f はフィルター化設計変数, \beta は射影勾配パラメーター, p_\mathrm{SIMP} はペナルティパラメーター付き固体等方性材料 (SIMP)です. これらのパラメーターは最適化された設計に強い影響を与える可能性があるため, 不正な極小値を回避するには, これら 2 つのパラメーターのいくつかの組み合わせについて最適化問題を解くことが必要になる場合があります. つまり, 以下に示す梁の例に示すように, 最適化問題のパラメトリックスイープが解かれます. 梁は左側に固定されており, 右端で総重量の 15% の重りを支えます. 梁には 40% の体積制約が適用されます. トポロジ最適化問題は, パラメーター (p_\mathrm{SIMP}, \beta) の 5 つの組み合わせ ((1, 2), (2, 4), (3, 8), (4, 16), (5, 32). 初期の最適化では接続性とグレースケールが不十分になることが予想されますが, これらの非物理的なデザインは, 後の最適化では良好な初期デザインを提供します.
最適化履歴を通じてアニメーション化される梁の設計. 変位は \theta=0.5 輪郭上の色で示されます.
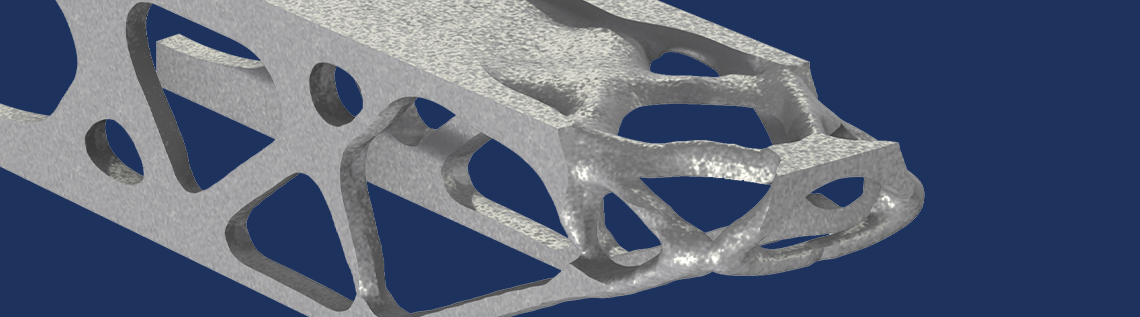
トポロジ最適化を実行するときは, ボディにフィットしたメッシュで検証シミュレーションを実行することをお勧めします. これは, このモデルの アプリケーションギャラリ バージョンで実行されており, 結果は, 生の最適化結果と相対的に, 固有周波数がより高いという点で, パフォーマンスの上で, 優れていることを示しています. 暗黙的な設計表現により, 固体と空隙の界面付近で材料の剛性が低下しますが, これは予想されることです.
最後に, ここでは 1 つの最適化結果を示していますが, 体積分率, 追加質量, または最小長さのスケールに異なる値を使用することで, 簡単に代替設計を生成できます.
おわりに
形状とトポロジ最適化を使用して固有周波数の最大化を実行できます. 多くの場合, 対称条件をフィジックスに課すことはできませんが, 最適化を制限して対称設計が生成されるようにすることはできます. 目的が特定の不要な周波数までの距離を最大化することである場合, モード切り替えの処理に使用される最大/最小戦略も適用できます.
固有周波数の最大化を実際に体験するには, このブログで説明されている例をアプリケーションギャラリからダウンロードしてください.
コメント (0)