
最近では, ほとんどの人が全地球測位システム (GPS) に接続されたナビゲーションデバイスなしで旅を始めることはありません. しかし, 車両が地下に潜ったり, 高層ビルの間に入ったりすると GPS 信号が途切れることがあります. そのため, 多くの車両, 携帯電話, およびその他のデバイスに慣性測定ユニット (IMU) が搭載されています. IMU は信じられないほど小さくて正確なジャイロスコープと加速度計を使用して地球の x, y, および z の直交軸に関する動きを決定します. MEMS ジャイロスコープや加速度計を含む IMU の部品は, COMSOL Multiphysics® ソフトウェアを使用してモデル化できます.
“あなたはここです” と “こちら側が上” は役に立たない
真っ黒な空を想像してみてください. その闇は天の川として知られる何千もの白い点で少しだけ明るくなっています. 私たちの銀河の上で, 矢印が小さな点の1つを指しており, 「あなたはここです」という役に立たないテキストが表示されています.

役に立たない参照座標系を持つ航法計器の例.
空の星の数と同じくらい多くのオタク T シャツや教授のドアに表示されたこの古い視覚的なジョークは, ナビゲーション (および人生!) の相対論的性質についてのいくつかの真実を示唆しています. オブジェクトの位置は, それを取り囲む空間との関係でのみ有効に記述できます. ナビゲーションではその空間が参照座標系です.
道路地図に進路を描くとき, 私たちは2次元の基準座標系内をナビゲートしています. 地図だけでは, 私たちが丘を上っているのか下っているのか, あるいは車が転覆の危険にさらされているのかどうかを知ることはできません. IMU 搭載のナビゲーションシステムは, 直線加速度と角加速度の両方を測定することにより, 3次元空間での車両の軌跡を計算できます. 3つの加速度計をそれぞれ x, y, または z 軸に沿って配置することで3D 空間で直線運動を追跡できます. 同様に, 3つのジャイロスコープをそれぞれ x, y, または z 軸に沿って配置すると, 3D 空間で回転を測定できます. (参照 1)
石頭? それは加速度計の一部
ばかげたことをすると, 石頭と言われるかもしれません. そのときには, あなたは正直に 「はい, 私たち全員がそうです. 馬鹿でも知っています!」 と答えることができます! すべての脊椎動物の体には, 主に石灰岩の主成分である炭酸カルシウムでできた微細な耳石があります. (耳石はギリシャ語で耳石を意味します.) 私たちの頭の中のこれらの石は私たちの体の自然な加速度計の不可欠な部分です. (参照2)
加速度計はハウジングに取り付けられた柔軟な構造に吊り下げられたプルーフマスで構成されています. ハウジングが加速するとプルーフマスも加速し, サスペンションに測定可能な歪みが生じます. 耳の中の加速度計の場合, プルーフマスは耳石の束です. この束は微視的な毛と付着した神経から吊り下げられた膜に付着しており, 質量が変化すると電気的変化を感知します. この有機加速度計は参照座標系として機能する内耳構造に取り付けられています.
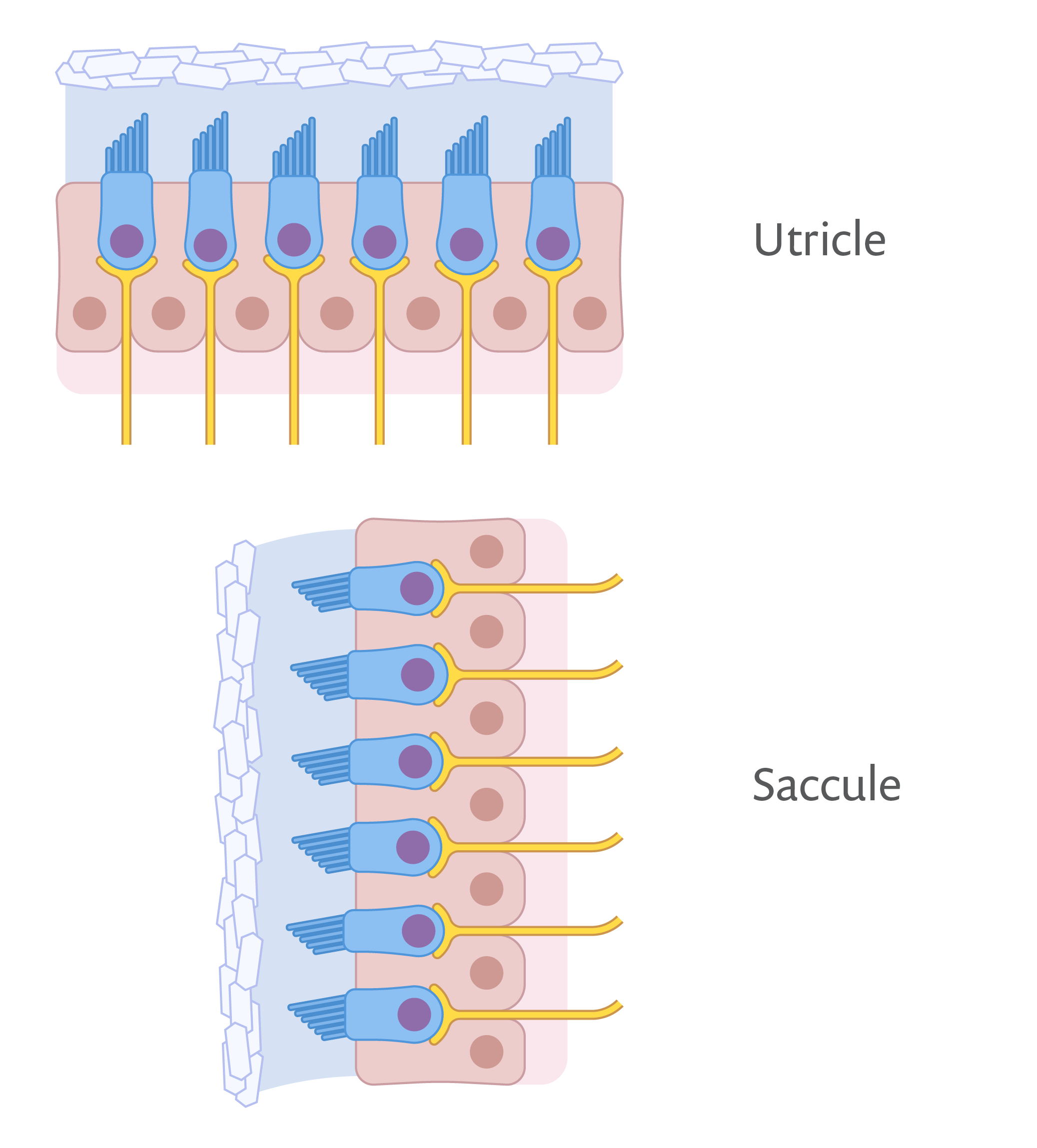
人間の体には水平に配置された卵形嚢と, 各耳に垂直な嚢があります. これらの微視的な構造のそれぞれには吊り下げられたプルーフマスが含まれており, 加速度に反応して付着した神経を刺激します. (参照3)
私たちの体が急激に動くと, プルーフマスの変位が私たちの神経に落下の可能性を警告します. これにより目や耳などの他の感覚器官が参照座標系を追跡できなくても, 神経は体の動きを検出できます. 表面を微細加工した加速度計はデバイスや車両に対して同様の機能を果たします.
MEMS 加速度をモデル化するビルディングブロック
ここで紹介するチュートリアル モデルは, MEMS モジュールの電気機械マルチフィジックスインターフェースを使用して表面マイクロマシン加速度計をモデル化する方法を示しています. このモデルは, プルーフマス, プルーフマスを支持するアンカースプリング, および電極アレイの3つのサブアセンブリで構成されます. スライドショーを参照して, 3つのサブアセンブリすべてと完全なモデルを確認してください.
 電極が取り付けられたプルーフマスのビルディングブロック.
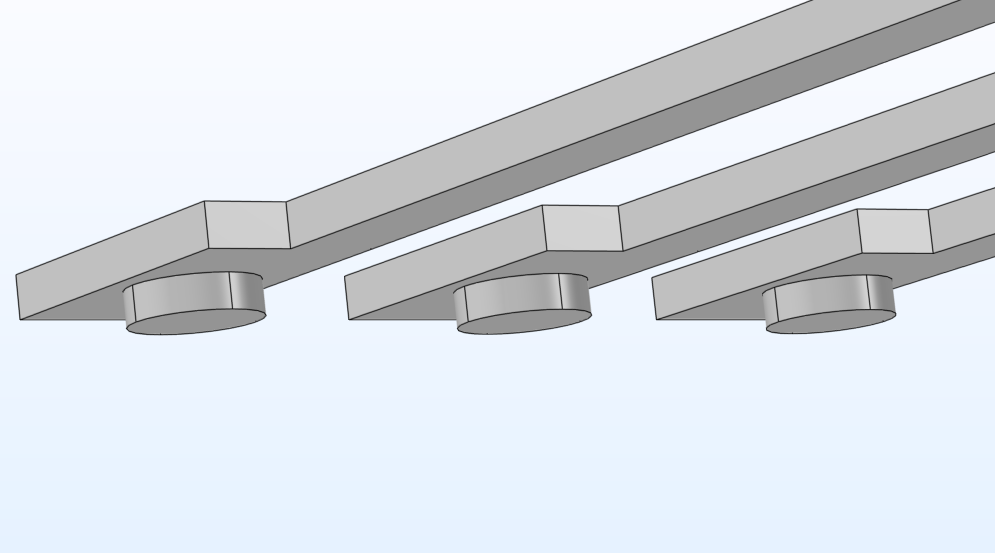
電極が取り付けられたプルーフマスのビルディングブロック.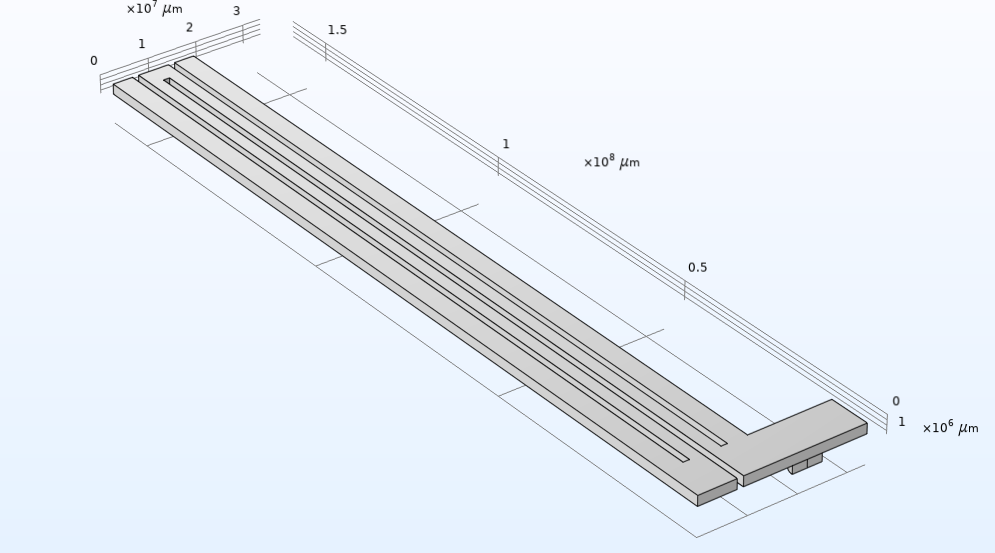 アンカースプリングのビルディングブロック.
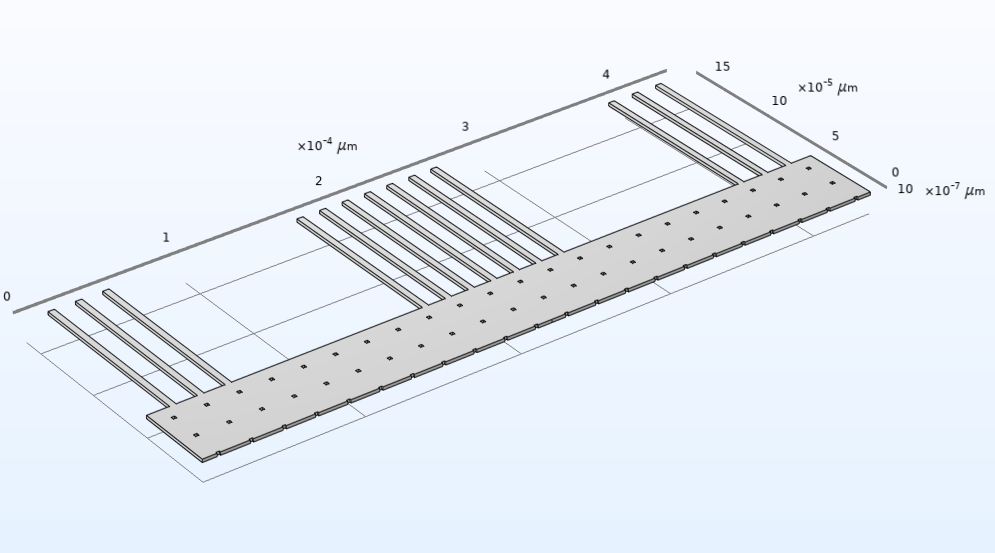
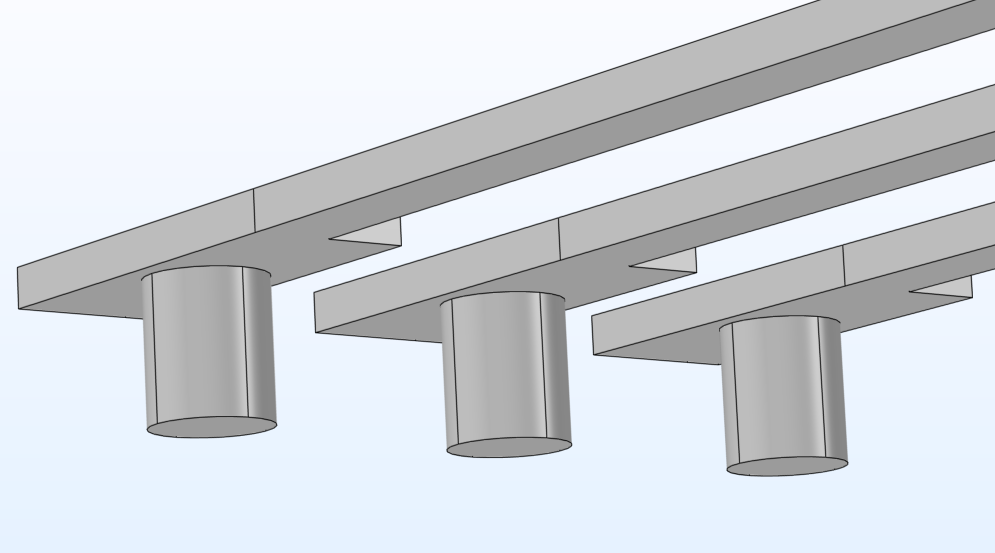
アンカースプリングのビルディングブロック.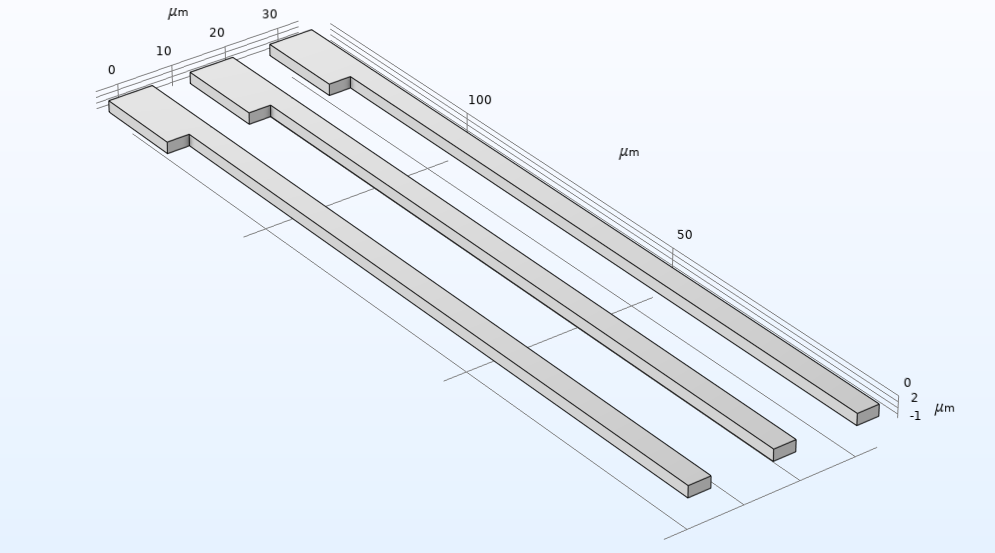 固定電極アレイの構成要素.
固定電極アレイの構成要素.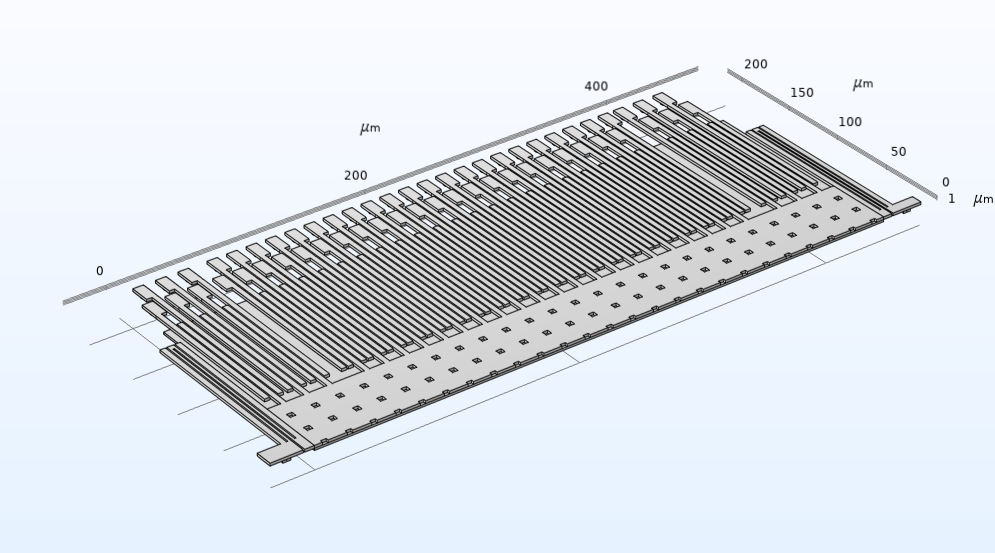 表面マイクロマシン加工された加速度センサーのモデル全体のジオメトリ.
表面マイクロマシン加工された加速度センサーのモデル全体のジオメトリ.




デバイスが加速するとプルーフマスが変位し, それによって固定電極と可動電極の間の静電容量が変化します. この静電容量の変化は加速度に比例します.
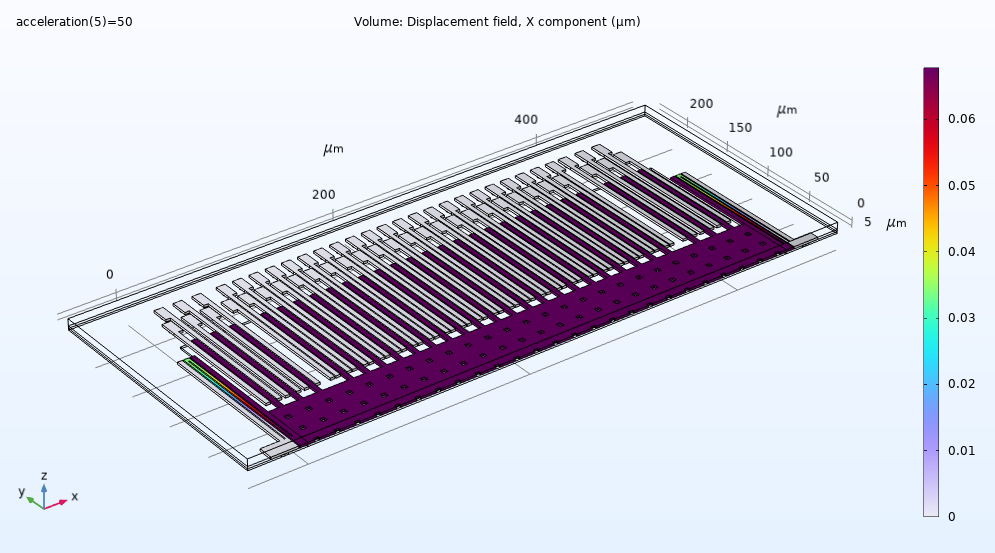
50 g の加速度を加えた場合の変位. このシナリオではプルーフマスは約0.07マイクロメートル移動します.
モデルを定義するときに, プルーフマス, バネ, および電極の3つのコアモジュールの寸法, 方向, およびその他の属性を指定できます. サブシーケンスとも呼ばれるこれらのモジュラービルディングブロックの主要な属性の値を調整することで, さまざまな設計オプションをテストできます. このモジュール性により加速度計の部品とその構成のシミュレートされたプロトタイピングとテストがサポートされます.
左図は加速度計モデル用のモジュラービルディングブロック電極アレイ. 右の再設計された配列は, キー属性を調整することにより同じモジュラーサブシーケンスから作成されました.
音叉ジャイロスコープの上と下
自然が一部の動物に加速度計を装備させたように, 他の動物は独自のジャイロスコープを持っています! イエバエ, 蚊, その他の飛ぶ昆虫には, 肩甲骨と呼ばれる2つの付属器官があり, このツルハエの翼の後ろに見ることができます:
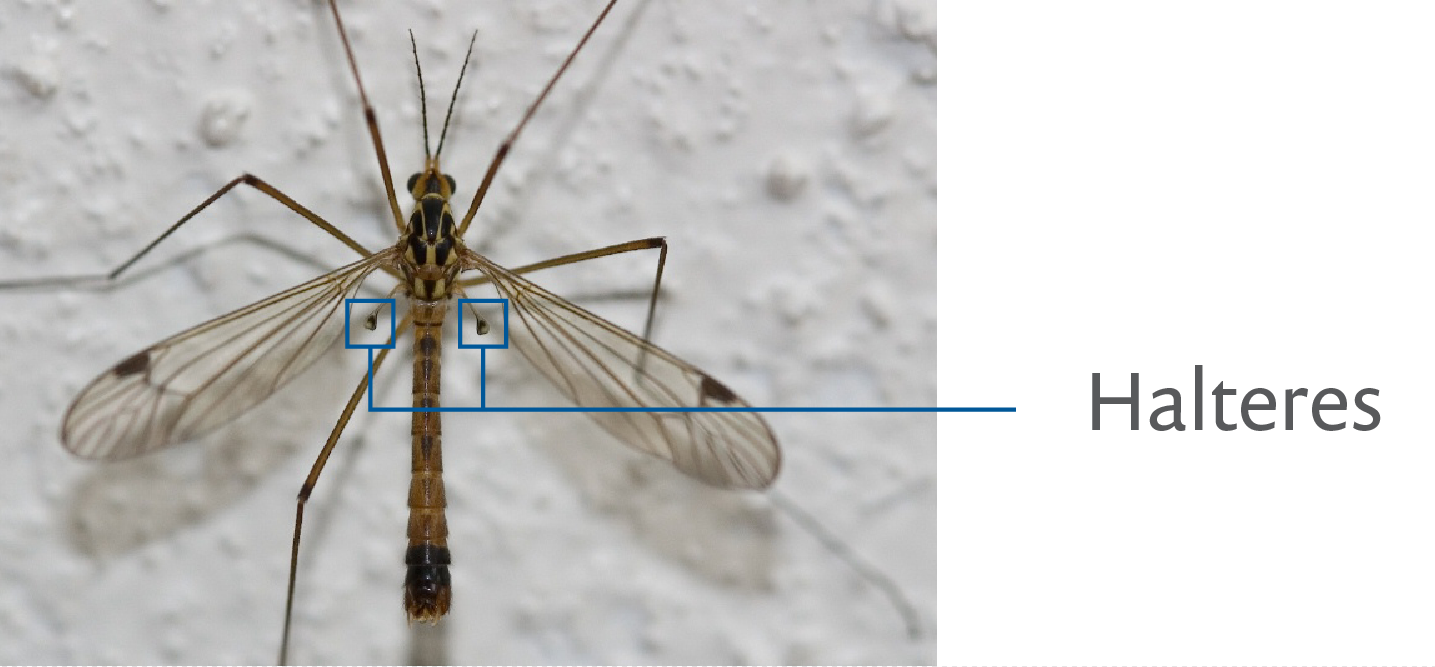
ホルターの位置を示すクレーンフライの上面図. Andre Vrijens 氏によるオリジナル画像, Wikimedia Commons によるライセンス CC BY 3.0 により取得.
昆虫のホルターは, 翼に合わせて素早く羽ばたきます. 水平飛行では, この動きは上下の経路をたどります. しかし虫が体を傾けると, コリオリ効果によりホルターの進路が変わります. これによりホルターが上下だけでなく左右にも動きます. 昆虫は, ホルターが付着した毛にかかる圧力を介してホルタの移動の動きを認識します. この情報により飛行経路に対する向きを制御できます.
圧電レートジャイロスコープは同様の原理に従って動作します. モデルを調べてその方法を学びましょう.
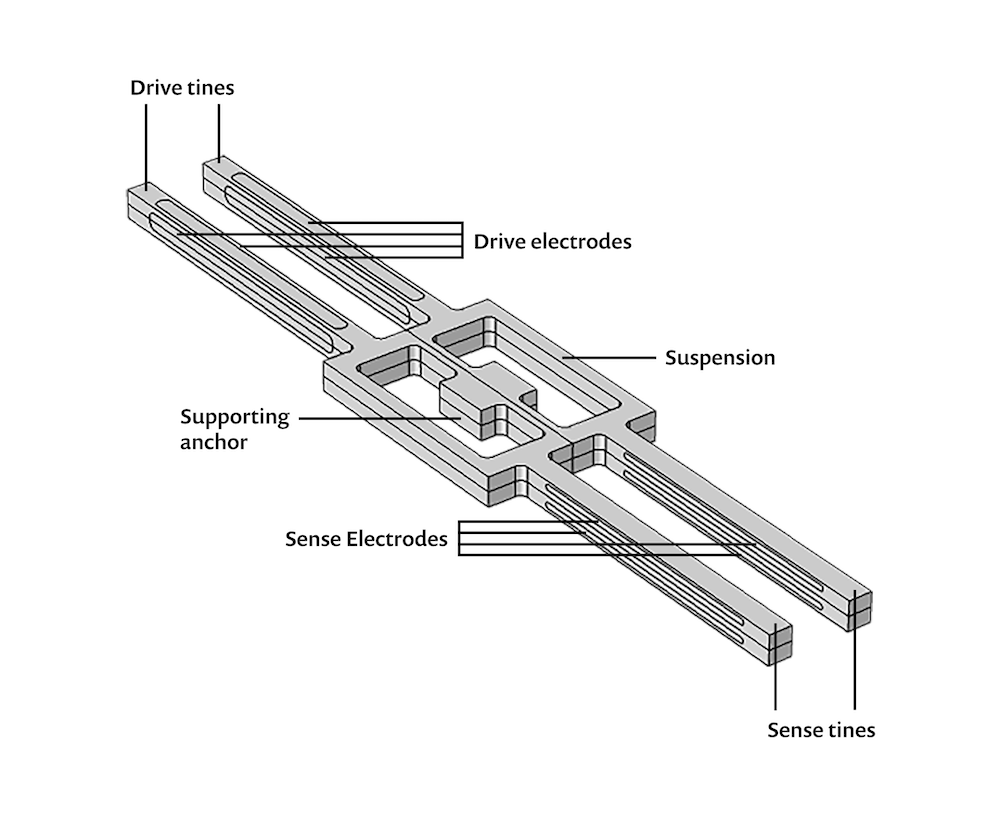
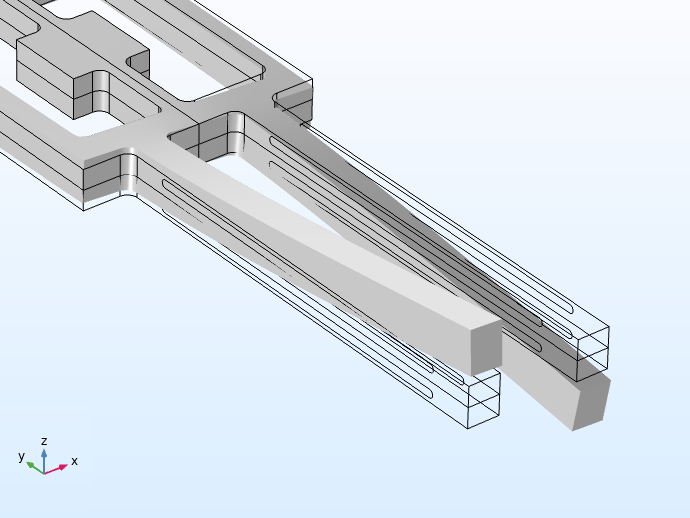
デバイスの中心と主要部分を通る対称面を示す, モデル化された音叉ジャイロスコープの概略図.
ジャイロの中心にある長方形がサスペンションです. この要素の支持アンカーは, ジャイロスコープが取り付けられているデバイスにしっかりと取り付けられています. 2対の突出部は駆動歯と検知歯です. 歯の両方の電極によりデバイスの向きに関する有用なデータが得られます.
これがどのように機能するかを説明するために, デバイスが静止しているか, 基準座標系に対して等速運動 (直線または回転加速度のない運動) にある場合に歯がどのように動作するかを考えてみましょう. 次に, デバイスが回転しているときに歯の動作がどのように変化するかを見ていきます. ドライブ歯に電気信号が印加されると, 検知歯が xy 平面内の共振周波数で振動します. デバイスが y 軸を中心に回転している場合, 以下に示すように, コリオリ力によって面外振動が発生します.
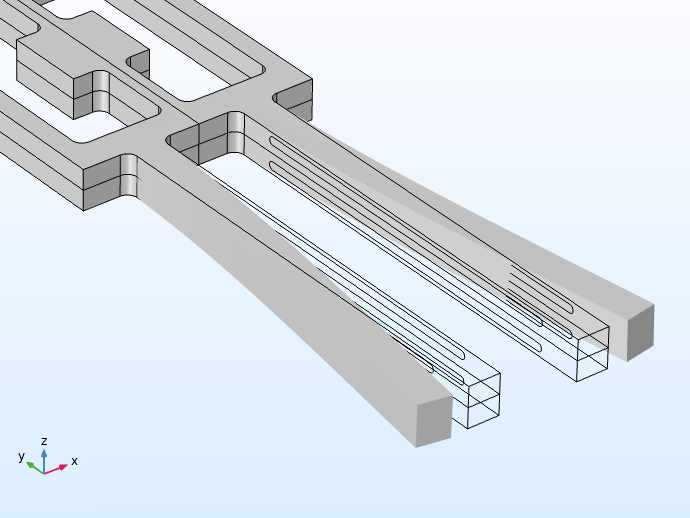
左図では, デバイスが等速運動しているときに電流を印加すると, xy 平面に沿って歯が振動します. 右図では, y 軸を中心としたデバイスの回転により, z 軸に沿って面外振動が発生します.
駆動歯と検知歯の共振周波数が異なることに注意してください. ジャイロスコープが動作しているとき, 駆動歯の電極は, 逆圧電効果によって共振周波数で振動するよう刺激します. デバイス全体が y 軸を中心に回転すると, 結果として生じるコリオリ力が検知歯を励起して面外に振動させます. この動きにより, 直接圧電効果によって検知歯の電極に電流が生成されます.


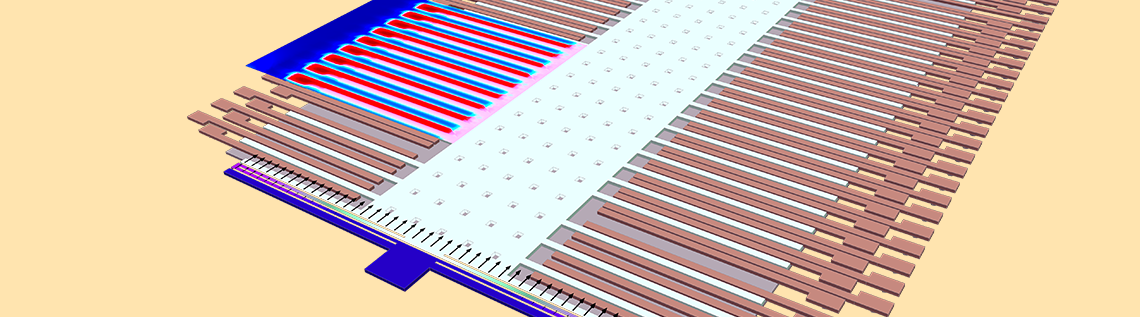
左の画像は, 加速も回転もしていない等速運動のデバイスの2つのプロットを示しています. 歯が xy 平面で振動していることに注意してください. 右側ではデバイスが y 軸を中心に回転しているため, 歯が xy 平面から振動します. 両方の画像で, 左側のプロットは変位の大きさを示す色の変化を示し, 右側は空間における歯の実際の変位を示しています.
デバイスが y 軸を中心に回転し, 面外振動が発生したときの歯の動作のアニメーション. 左側の色の変化は変位の大きさを示し, 右側の画像は空間内の動きを示しています.
あなたはここです (最後に. そして最初にも…)
このブログの最後までおつきあいいただきありがとうございます. MEMS 加速度計とジャイロスコープのモデリングの旅は以下のリンクから続行できます:
- 加速度計モデルへのスピードオーバー: 表面マイクロ加工加速度計
- ジャイロスコープのモデルを試してみましょう: 圧電レートジャイロスコープ
さらなる圧電デバイスモデリング
参考文献
- B. Schweber, “The Autonomous Car: A Diverse Array of Sensors Drives Navigation, Driving, and Performance”, https://www.mouser.com/applications/autonomous-car-sensors-drive-performance/
- D. Purves, G.J. Augustine, D. Fitzpatrick, et al., editors, “The Otolith Organs: The Utricle and Sacculus”, Neuroscience. 2nd edition. Sunderland (MA), Sinauer Associates, 2001; https://www.ncbi.nlm.nih.gov/books/NBK10792/
- T. C. Hain, “Otoliths”, Mar. 2021; https://dizziness-and-balance.com/disorders/bppv/otoliths.html
コメント (0)