COMSOL Multiphysics® ソフトウェアは, チェーンドライブシステムをモデル化する簡単な方法を提供します. このチェーンドライブモデリングブログシリーズの最初のパートでは, COMSOL Multiphysics パーツライブラリに組み込まれているパラメトリックジオメトリパーツを使用して, ローラーチェーンスプロケットアセンブリのリアルなジオメトリモデルを作成する方法を説明します.
チェーンドライブシステムの紹介
自転車のチェーンがいかに重要かご存じでしょう. ペダルを踏んで自転車のフロントスプロケットを回転させると, この回転をリアスプロケットとそれに接続されたホイールに伝達するのはチェーンです. チェーンとスプロケットの同様のアセンブリは, あるシャフトから別のシャフトに動力を伝達したり, 重い物体を持ち上げたりするために, 多くの機械でも使用されています.

自転車のチェーンドライブとギア. 5 Cent Dollar &mdashによる画像—自身の作品. Wikimedia Commonsを介して, CC BY-SA4.0の下でライセンス供与されています.
チェーンドライブは重要な動力伝達システムであり, 多くの産業用アプリケーションで広く使用されています. それらの主な用途には, トルクまたは運動の伝達, 材料の搬送, または機械的アセンブリの異なる部品間の運動の同期です. さまざまな材料とさまざまなサイズで作られたチェーンドライブは, 自動車, コンベヤー, フォークリフトなどの巻き上げ装置など, さまざまな用途で使用されています.
チェーンドライブシステムの2つの基本部品は, チェーンとスプロケットです. チェーンは, ピン接続を使用して結合されたリンクのアセンブリです. これは, スプロケットと呼ばれる1つまたは複数の歯車に巻き付けられており, 通常, 機械の指定されたシャフトに取り付けられます. チェーンは, 接触するスプロケットの歯を噛み合わせてスライドさせることにより, あるスプロケットから別のスプロケットに動きを伝達します.
それらの用途に応じて, チェーンドライブのチェーンとスプロケットは異なるタイプにすることができます. サイレントチェーン, リーフチェーン, フラットトップチェーンなどが利用可能なチェーンタイプですが, 動力伝達に最も一般的に使用されるタイプはローラーチェーンです. 同様に, 特殊なニーズに適したさまざまなスタイルのスプロケットがあります.
アプリケーションに適した送電システムの選択は, 様々な要因によって異なります. チェーンドライブはギアやベルトドライブに比べて多くの利点がありますが, これらの利点に欠けている部分もあります. ベルトドライブで観察されるスリップと摩擦損失は, チェーンドライブでは最小限に抑えられます. ベルトドライブと比較して, コンパクトで取り付けが簡単で, 極端な気象条件に耐えることができます. ただし, 位置合わせに必要な精度は, ベルトドライブよりもチェーンドライブの場合の方が高くなります. 比較的離れた位置にあるシャフトを接続するには, ギアよりもチェーンドライブの方が適しています. ただし, 平行軸と非平行軸に使用できる歯車と比較すると, チェーンドライブは平行軸にしか取り付けることができません.
チェーンドライブシステムのモデリング
様々な理由により, 一般にチェーンドライブシステムとして知られているチェーンスプロケットアセンブリのダイナミクスをシミュレートすることは困難な作業です. チェーンドライブシステムをシミュレートするには, 関連するすべての部品を使用してチェーンドライブをモデル化することが不可欠です. ただし, 一般的なチェーンドライブは, 複数のスプロケットに結合されて巻き付けられた複数のリンクで構成されているため, ジオメトリを構築する最初のステップには長い時間がかかります.
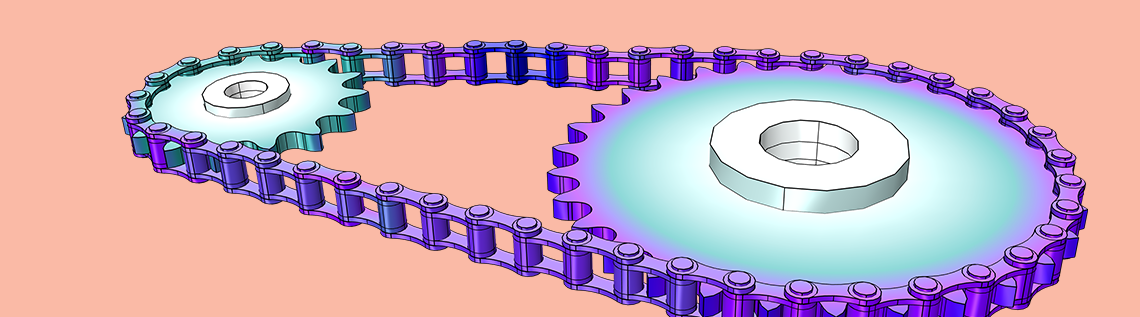
チェーンドライブシステムの3Dアニメーションモデル.
正しいジオメトリを構築した後でも, システムの動作を再現するために適切な物理特性を設定することは別の課題です. たとえば, スプロケットを使用したチェーンリンクの連結とリリースのメカニズムをシミュレートするには, スプロケットの歯と接触するチェーンリンクの間の構造的接触をモデル化する必要があります. 同様に, チェーンがスプロケットにフィットして移動するのに役立つ, 隣接するチェーンリンクに対するチェーンリンクの回転は, 正しいダイナミクスを捉えるためにモデル化しなければならない重要な側面です.
原則として, COMSOL Multiphysicsのアドオンであるマルチボディダイナミクスモジュールで利用可能な様々な機能を使用してチェーンドライブシステムを設定できます. ただし, システムの各部品に現実的なチェーンドライブジオメトリと関連するフィジックスの機能を手動で設定することは, 非常に時間がかかり, エラーが発生しやすいプロセスです. これらの手順を簡素化し, チェーンドライブをすばやくモデル化するために, COMSOL Multiphysicsはバージョン5.5で新機能を導入しました.
マルチボディダイナミクスインターフェースで利用可能なチェーンドライブ機能を使用すると, ボタンを1回クリックするだけで, 複数のフィジックスの機能が一度に追加されたチェーンドライブのモデル設定を簡単に生成できます. モデルの設定を容易にするために, バージョン5.5では, チェーンスプロケットアセンブリのパラメトリックジオメトリを構築するために使用できる一連の組み込みジオメトリパーツが導入されました.
このブログシリーズの最初の方では, パーツライブラリの組み込みジオメトリパーツを使用して, カスタマイズされたチェーンドライブジオメトリを構築する方法について学習します. このブログシリーズの第2部では, チェーンドライブ機能がジオメトリを入力として使用し, 解析に必要なさまざまな物理機能を自動的に構築する方法に焦点を当てます.
COMSOL Multiphysics®でローラーチェーンの形状構築
チェーンドライブの正確なダイナミクスをシミュレートするには, 現実的なシステムジオメトリが不可欠です. 部品の数が多く, 配置が複雑であるため, ほとんどの実用的なケースでチェーンスプロケットアセンブリのジオメトリを構築することは簡単な作業ではありません.
COMSOL Multiphysics またはCADソフトウェアを使用してチェーンドライブジオメトリをすでに構築している場合は, それをCOMSOL Multiphysics にインポートして, 解析の次の段階に進むことができます. ただし, インポートされたジオメトリの主な欠点は, モデリング中にその場で変更できないことです. したがって, いくつかのジオメトリ(チェーンピッチ, 幅, チェーンリンクの数, スプロケットの歯の数など)を変更してパラメトリックスタディを実行することが目的の場合, インポートされたジオメトリは最良の選択ではないかもしれません. これには, パラメトリックジオメトリモデルを使用する必要があります. このモデルでは, 入力パラメーターのセットを微調整して, システムジオメトリの形状とサイズを変更できます.
バージョン5.5以降, COMSOL Multiphysics は, パーツライブラリの組み込みパーツを使用して, ローラーチェーン, スプロケット, およびローラーチェーンスプロケットアセンブリのパラメトリックジオメトリモデルを簡単に作成することが出来ます. チェーン, スプロケット, およびチェーンスプロケットアセンブリの形状とサイズをカスタマイズするために使用できる入力パラメーターの広範なセットを使用して, 2Dまたは3Dで独自のチェーンドライブジオメトリをすばやく作成できます. さまざまなドメインと境界で利用できるさまざまな組み込みの選択により, これらのジオメトリにさまざまな物理特性と境界条件を簡単に設定できます. 組み込み部品から作成された形状のもう1つの利点は, 必要に応じて, これらの形状をCAD形式でエクスポートして, CADソフトウェアで使用できることです.
ローラーチェーンスプロケットアセンブリの部品
組み込みパーツをジオメトリ構築に使用する方法を学習する前に, チェーンドライブジオメトリのさまざまな構成要素と, それらを組み立ててシステムを形成する方法を理解することが重要です. 次のセクションでは, ローラーチェーン, スプロケット, およびローラーチェーンとスプロケットの組み立ての詳細について説明します.
ローラーチェーン
ローラーチェーンは, ピンジョイントを介して接続された一連のリンクプレートです. 次の図に示すように, 2Dの一般的なローラーチェーンには2種類のリンクプレートがあります.
- ローラープレート
- ピンプレート
ピン間の接続は, ピン間の相対回転が制限されないように設計されています. 多くの場合, 弾性ブッシングはローラープレートとピンプレートの間に存在します.
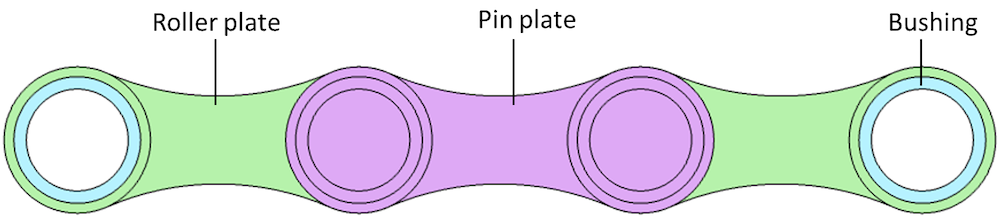
2Dのローラーチェーンユニットの部品.
3Dローラーチェーンの場合, 構成要素は3Dリンクプレートです. ここで, ローラープレートは, 2つのサイドプレートで結合された2つの中空シリンダーで構成されています. 同様に, ピンプレートは, 2つのサイドプレートで結合された2つの中実シリンダーの結合です. チェーンは, 隣接するローラープレートの中空の円筒形の脚に中実のピンプレートを挿入することによって形成され, 圧入接続を生成します. このタイプの接続は, リンク間の相対的な回転を可能にし, それによってシステムのある部分から別の部分への動きの伝達を助けます. オプションで, ローラーとピンプレートの間に弾性ブッシングを含めることができます.
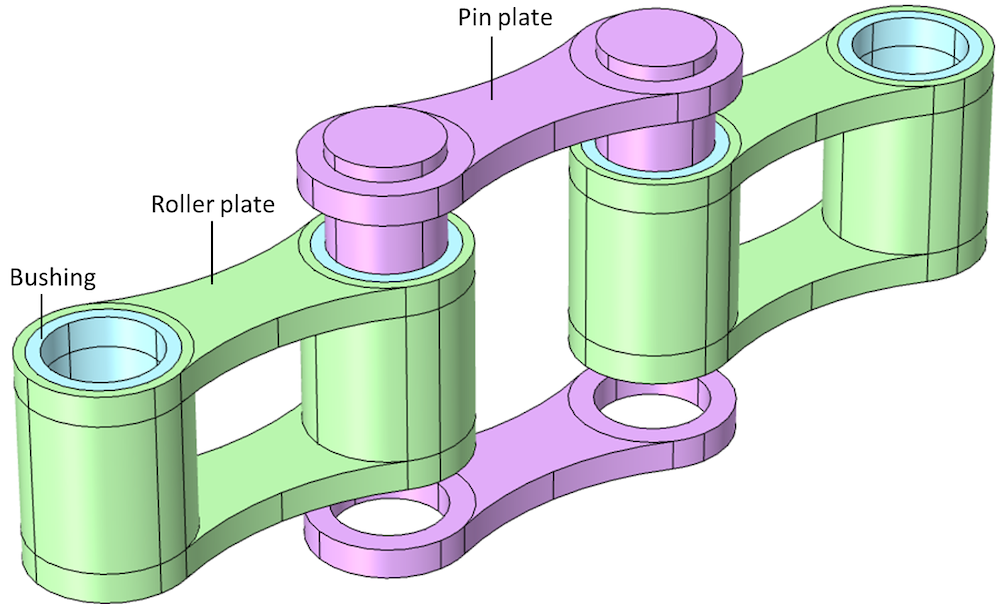
3Dでのローラーチェーンユニットの分解図.
スプロケット
2Dモデリングの場合, スプロケットは, チェーンのローラーが移動中に連続的に噛み合ったり外れたりする, いくつかの歯を持つ円形の物体です. オプションでボアホールを作成できます. これは, シャフトなどの外部部品にシステムを取り付けるときに役立ちます. 3Dでは, スプロケットの上面と下面の両方にハブを作成することもできます.
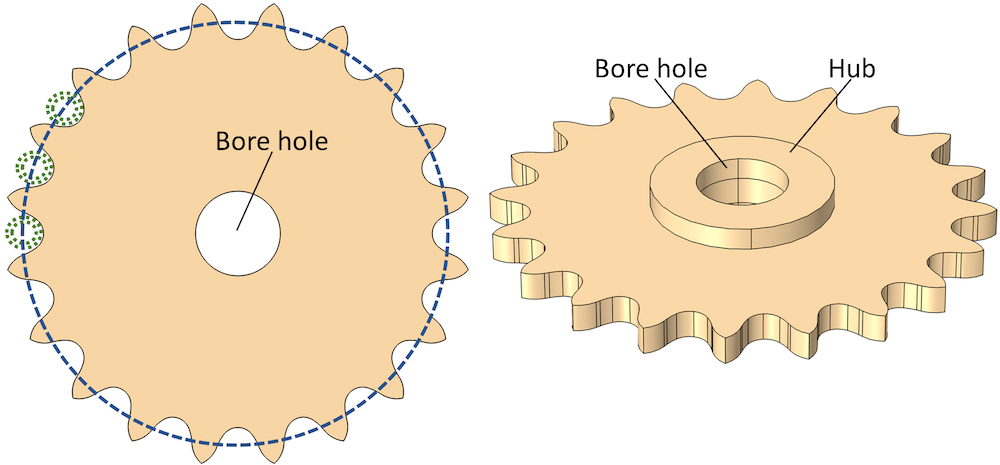
2Dおよび3Dのスプロケットジオメトリ.
ローラーチェーンスプロケットアセンブリ
チェーンとスプロケットのジオメトリパーツを常に組み合わせて使用する必要はありません. 特定のモデリングの目的で, ローラーチェーンまたはスプロケットパーツをモデルに個別に追加し, それらを他の部品と組み合わせて, 複雑なモデルジオメトリを構築することもできます. 一方, チェーンドライブのダイナミクスをシミュレーションすることに関心がある場合は, チェーンパーツを個別に追加して組み合わせる必要はありません. 代わりに, 2Dと3Dの両方で利用可能なローラーチェーンスプロケットアセンブリの3番目の組み込み部分が用意されています. 下の図に示すように, ローラーチェーンスプロケットアセンブリパーツでは, ローラーとスプロケットのジオメトリパーツを使用して, 2つのスプロケットがリンクの閉ループで接続されたシステムのジオメトリを作成します.


2Dおよび3Dのローラーチェーンスプロケットアセンブリ.
COMSOL Multiphysics® のパーツライブラリからチェーンジオメトリパーツを追加する.
COMSOL Multiphysics のパーツライブラリには, 様々なセクションに分類された, アプリケーションに役立つ, 様々な幾何学的パーツが含まれています. ローラーチェーンと関連するジオメトリパーツは, パーツライブラリのマルチボディダイナミクスモジュールセクションで利用できます. 次の図に示すように, パーツライブラリウィンドウを開くには, モデルのジオメトリノードを右クリックし, パーツサブメニューからパーツライブラリを選択します.
モデルにパーツを追加するには, ジオメトリに追加ボタンをクリックします. これにより, 選択したパーツが, パラメトリックジオメトリの構築に使用できるパーツインスタンスとしてモデルジオメトリに追加されます. パーツインスタンスの設定ウィンドウの入力パラメーターセクションには, パーツのジオメトリを構築するために使用されるパラメーターのリストが表示されます. 様々なパラメーターのデフォルト値を変更して, チェーンドライブシステムのジオメトリを構築できます. パーツの位置と方向を入力するオプションもあります.

マルチボディダイナミクスモジュールのローラーチェーンフォルダーには, 2Dおよび3Dジオメトリ用の様々なジオメトリパーツが含まれています. ここでは, 3Dの roller_chain_sprocket_assemblyパーツを選択して, ジオメトリに追加しています.

ジオメトリシーケンスのパーツインスタンスとして追加されたローラーチェーンスプロケットアセンブリ. この部分のすべてのパラメーターは, 入力パラメーターセクションに記載されています.
次のセクションでは, さまざまな入力パラメーターの詳細と, それらをカスタマイズして様々なタイプのローラーチェーンアセンブリを生成する方法について説明します.
ジオメトリパラメーターの設定
市場に出回っているローラーチェーンとスプロケットは, 通常, さまざまな構成部品の寸法を示す一連の番号で識別されます. これらの番号は, 部品にマークされているか, 製品と一緒に提供されます. これらの情報が得られない場合は, チェーンとスプロケットの寸法を測定して調べることもできます. 基本的な幾何学的寸法がわかれば, COMSOL Multiphysicsのパーツライブラリを使用してそれらを複製するのは非常に簡単です. ジオメトリパーツのパラメトリックな性質を利用して, パラメーターの最小セットを入力するだけでチェーンドライブジオメトリを構築できます.
組み込み部品は, 特定のジオメトリ部品をオプションで組み込む柔軟性も備えています. たとえば, システムにリンク間のブッシング, スプロケットのボアホール, スプロケットの上面と下面のハブなどの要素が含まれていない場合は, 対応するパラメーターをゼロに設定するだけで,最終的なジオメトリからそれらを簡単に除外することができます.
以下に, ローラーチェーン関連の部品に使用できるいくつかの重要なパラメーターと, それらをカスタマイズしてチェーンドライブの形状を構築する方法を示します.
ローラーチェーンパラメーター
ローラーチェーンとスプロケットの形状を構築するために必要なパラメーターの中で, ピッチは最も重要です. ピッチとは, 2つの隣接するリンクの中心間の距離のことです. 多くの規格やサプライヤは, ピッチ寸法を使用してローラーチェーンを識別します. 他のチェーン部品のサイズは, ほとんどの場合, ピッチの固定比率として設定されます. この広く受け入れられている製造方法に準拠するために, 組み込み部品の入力パラメーターはピッチに関して無次元化されています.
ローラーチェーンで利用できるいくつかの重要なパラメーターは次のとおりです.
- ピッチ(p)
- チェーンリンクの数(n)
- スプロケットの幅とピッチの比率(W)
- ローラーの直径とピッチの比率(Dr)
- ピンの直径とピッチの比率(Dp)
- 最小リンクプレート幅対ローラー直径比(Wl)
入力パラメーター付きのローラーチェーンユニット.
上記のパラメーターを調整することにより, チェーンリンクの形状とサイズを変更できます. たとえば, チェーンジオメトリをスケーリングする場合は, ピッチ値を変更することですばやく実現できます. 対応するリンク径パラメーターの値を変更することにより, 同じピッチ値でローラーとピンプレートの寸法を個別に変更することもできます.
左:ピッチが異なり, リンク直径比が同じ3つのローラーチェーンユニット. 右:同じピッチでリンク直径比が異なる3つのローラーチェーンユニット.
お気づきかもしれませんが, 一部のローラーチェーンのサイドプレートの形状は直線ですが, 他の一部のチェーンでは湾曲しています. 最小リンクプレート幅とローラー直径の比率パラメーター(Wl)を変更することにより, COMSOL Multiphysics で直線プレートと曲線プレートの両方の形状を生成できます.
サイドプレートの形状が異なる3つのローラーチェーン. 左から右:最小リンクプレート幅対ローラー直径比(Wl)のパラメーターは, それぞれ0.92, 0.6, および0.25に設定されています. 直線または曲線の形状のローラーチェーンを構築します. すべての場合において, オプションのパラメーターDbは, リンク間にブッシングがない場合はゼロに設定されます.
スプロケットパラメーター
チェーンドライブが正しく機能するためには, スプロケットとチェーンが互いに互換性がある必要があります. これを確実にするために, スプロケットの隣接する歯の中心間の距離はチェーンのピッチと同じに保たれます. 同様に, 各スプロケットの歯は, チェーンローラーに正しくフィットするように構成されています. また, スプロケットの最大幅は, 内側のリンクプレート間の明確な距離に制限されます. 必要に応じて, スプロケットとチェーンプレートの間にある程度のクリアランスを組み込むためのパラメーターがあります.
スプロケットのいくつかの重要なパラメーターは次のとおりです.
- ピッチ(p)
- 歯数(N)
- スプロケットの幅とピッチの比率(Wsp)
- ローラーの直径とピッチの比率(Dr)
- ボア径対ピッチ径比(Dbr)
- ハブの直径とピッチの直径の比率(Dh)
- ハブの幅とピッチの比率(上(Whu)と下(Whd))
2Dおよび3Dの入力パラメーターを備えたスプロケット.
スプロケットは主にピッチと歯数で識別されます. 下の図に示すように, ピッチと歯数の組み合わせを変更することで, さまざまな形状のスプロケットを作成できます.
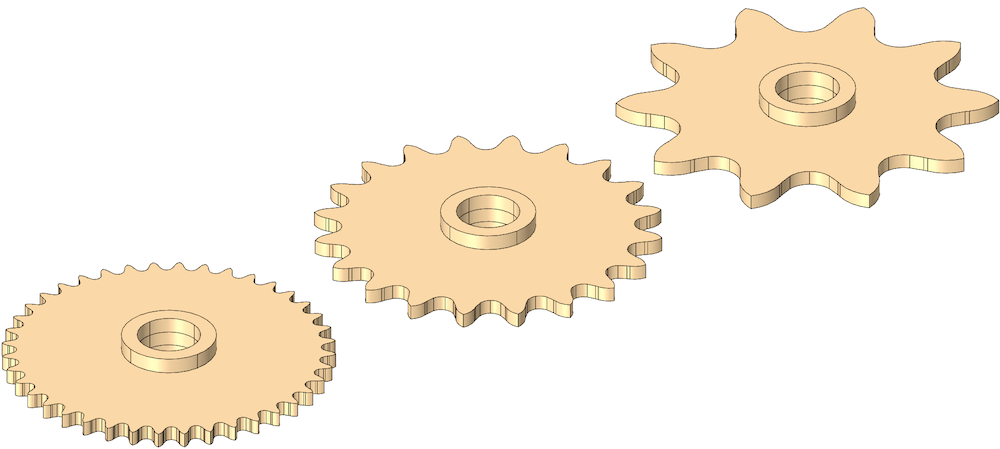
同じサイズで歯の数が異なる3つのスプロケット.
シャフトへの取り付けを容易にするために, スプロケットのデフォルトの形状には, 上面と下面にボアホールとハブが含まれています. 次の図に示すように, 対応するパラメーター値をゼロに設定することで, オプションでそれらをジオメトリから除外することもできます.
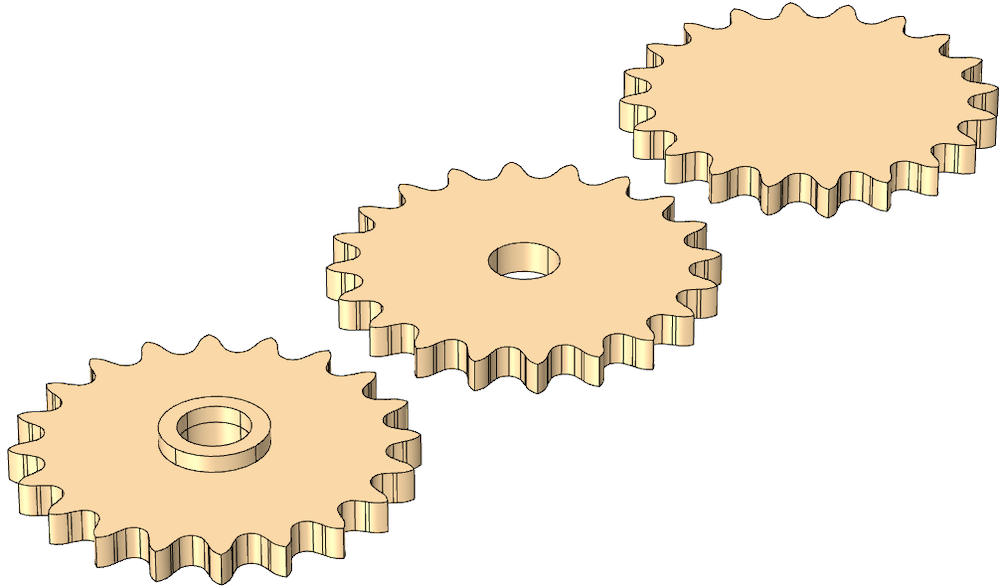
さまざまなオプション機能を備えたスプロケットの形状. 左:ボアホールとハブを備えたスプロケットのデフォルトの形状. 中央:上面と下面にハブなし. 右:ハブとボアホールなし.
ローラーチェーンスプロケットアセンブリパラメーター
チェーンとスプロケットの個々のプロパティを設定するために必要な前述のパラメーターに加えて, ローラーチェーンスプロケットアセンブリパーツには, 主にアセンブリのプロパティを制御するためのいくつかの追加パラメーターがあります. アセンブリパラメーターは次のとおりです.
- スプロケット中心距離(cd)
- チェーンリンクの数(Nc)
- 最初のスプロケットの歯数(n1)
- 2番目のスプロケットの歯数(n2)
- 最初のスプロケットの中心座標(x0, y0, z0)
- 方向(esx, esy, esz)
- スプロケットクリアランス(clrsp)
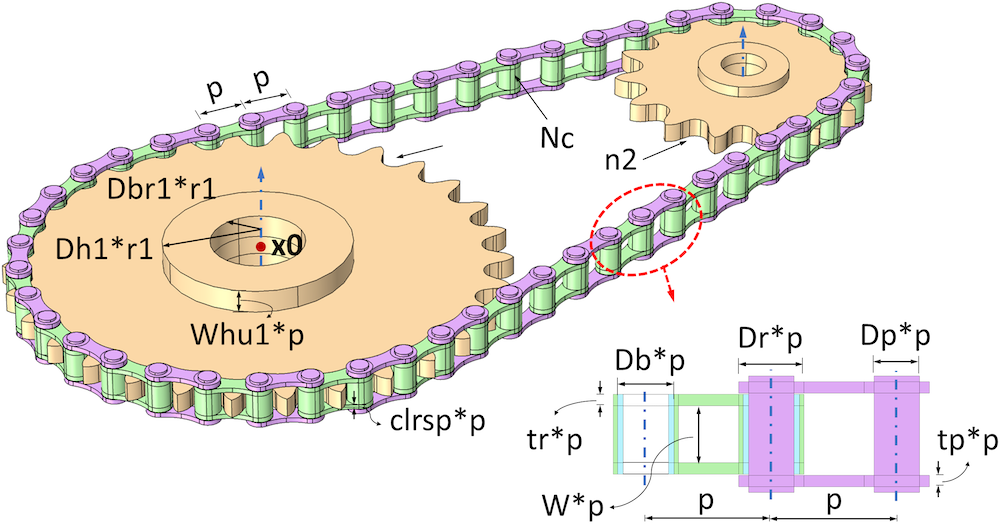
3Dの入力パラメーターを備えたローラーチェーンスプロケットアセンブリ.
ローラーチェーンスプロケットアセンブリを構築するための部品バリアント
ドライブを構築する際に, さまざまなタイプの制約を設定できます. 2つの固定シャフトに取り付けられた2つのスプロケット間で運動を転送する場合を想像してみてください. このような問題の場合, チェーンリンクの正確な数がわからない場合があります. むしろ, 特定の寸法と位置のスプロケットをカバーするために必要な数として計算されます. 2番目のシナリオでは, 固定長のチェーンを使用して2つのスプロケットを結合します. ここで, スプロケットの位置は, 指定されたチェーンの長さに対応するように調整可能です. ローラースプロケットアセンブリパーツのさまざまなバリエーションを使用して, COMSOL®ソフトウェアで両方のケースのジオメトリモデルをすばやく構築できます.
ローラーチェーンスプロケットアセンブリ部品に使用できる2つの部品のバリエーションは次のとおりです.
- スプロケットの中心距離を指定します
- チェーンリンクの数を指定します
ローラースプロケットアセンブリパーツをモデルジオメトリに追加している間, パーツバリアントを選択するためのウィンドウが表示されます. 入力内容に応じて, それらの1つを選択し, それをジオメトリに追加できます.
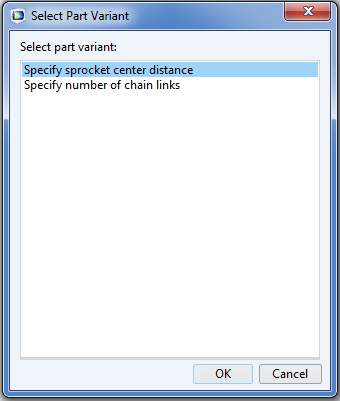
ローラーチェーンスプロケットアセンブリパーツの2つのパーツバリエーション.
1つを除く他のすべての入力パラメーターは, 両方のバリアントで同じです. スプロケット中心距離の指定バリアントを使用する場合は, スプロケット中心距離(cd)パラメーターを入力する必要があります. これに基づいて, COMSOL Multiphysicsは, 指定された距離に配置された2つのスプロケットを包むために必要な最小偶数のリンクを計算することによってジオメトリを構築します. 代わりに, チェーンリンクの数(Nc)は, チェーンリンクの数を指定するパーツバリアントに必要な入力です. COMSOL Multiphysicsは, 指定された数のリンクが2つのスプロケットを完全に包み込むように, 2番目のスプロケットの位置を調整します.
どちらの場合も, スプロケットの中心距離とチェーンリンクの数の計算は非線形方程式に基づいていることに注意してください. したがって, リンクがスプロケットにしっかりと巻き付いていない可能性があります. スプロケット間の中心距離を微調整する場合は, 中心距離補正パラメーター(ccorr)を1に設定し, それに応じて中心距離補正係数(cdelta)の値を調整します.
チェーンパーツによって提供される選択
組込み部品からさまざまなチェーンドライブ部品のジオメトリを作成する方法を見てきました. 前述のように, これらのパラメトリックジオメトリモデルは, チェーンドライブシステムの解析に必要な物理フレームワークを設定するために使用されます. これを容易にするために, 一連の選択がローラーチェーン関連のすべてのパーツに追加されます. これらの選択を使用して, さまざまな材料をさまざまな部品に簡単に割り当て, さまざまな境界条件を設定し, フィジックスの設定や後処理のステップを変更できます.
モデルのジオメトリにジオメトリパーツを追加すると, パーツインスタンスの設定ウィンドウのオブジェクトの選択, ドメインの選択, 境界の選択など, 使用可能なすべての選択が対応するセクションの下に一覧表示されます. ローラーチェーンスプロケットパーツでは, ローラープレート, ピンプレート, およびスプロケットオブジェクトに対して, 様々なオブジェクトの選択とドメインの選択が定義されています. 同様に, ローラープレート, ピンプレート, およびスプロケットの様々な境界の選択も定義されています. ローラーチェーンスプロケットアセンブリ部品で利用可能な定義済みの選択項目を次の図に示します. (このブログシリーズの第2部では, これらの定義済みの選択項目がチェーンドライブシステムの設定でどのように重要な役割を果たすかを詳細に説明します).
事前定義の選択項目をモデルに追加するには, 保持またはフィジックスの下のチェックボックスを使用します. 保持の下のチェックボックスを選択すると, 部品のジオメトリで対応する選択を保持できます. 材料を定義し, フィジックスを割り当てるときに選択できるようにするには, フィジックスの下のチェックボックスを選択します. 非寄与選択を保持チェックボックスを選択して, 保持列を無効にし, 累積選択に寄与しないすべての選択を保持します.

ローラーチェーンスプロケットパーツで定義されたさまざまなドメイン選択と境界選択. ドメインの選択, つまりすべてのチェーンリンクで構成されるリンクが強調表示されます.
現実的なジオメトリを構築するためのチェック
上記のように, チェーンとスプロケットのジオメトリパーツを構築するためにいくつかのパラメーターが使用されます. これらのパラメーターを入力するときは, 許容範囲内の適切な値を慎重に選択する必要があります.(たとえば, ピッチ, 幅, またはリンクの直径の値を負の数にすることはできません. )適切に選択しないと, 入力パラメーターの特定の組み合わせにより, 非現実的または無効な形状になる可能性があります. この問題を回避するために, パラメーターチェックノードのセットが各パーツに追加され, 入力された入力パラメーターとそれらの組み合わせが有効なジオメトリに受け入れられるかどうかをチェックします. ジオメトリの構築は, すべてのパラメーターチェックに合格した場合にのみ発生します. それ以外の場合は, パラメーターの修正方法に関する情報を含む適切なエラーメッセージが表示されます.
すべての部分に追加された共通のチェックは, 重要なジオメトリパラメーターの正の値に対するものです. さまざまなパーツのいくつかの追加の重要なチェックは次のとおりです.
- ローラーチェーン
- ローラーの直径はピッチより小さくする必要があります
- ピン径はローラー径より小さくする必要があります
- ブッシュの直径はローラーの直径より小さく, ピンの直径より大きくなければなりません
- スプロケット
- 歯の数は正の整数でなければなりません
- ボア径はルート径より小さくする必要があります
- ローラーチェーンスプロケットアセンブリ
- スプロケットの中心距離は, スプロケットの半径の合計よりも大きくする必要があります
- 最初のスプロケットの歯数は, 2番目のスプロケット以上である必要があります
上記のエラーメッセージのいずれかが発生した場合は, それに応じていくつかのパラメーターを変更し, ジオメトリを再構築してみてください.
チェーンドライブモデリングシリーズの次のブログでは, マルチボディダイナミクスモジュールを使用してチェーンドライブを設定する方法を紹介します. 乞うご期待!
次のステップ
これらの追加リソースを参照してください.
- COMSOL Multiphysicsのジオメトリパーツを使用したモデルジオメトリの構築について :COMSOL Multiphysics®のジオメトリパーツとパーツライブラリの使用
- Read this blog series on gear modeling
- COMSOL Multiphysics バージョン5.5以降のマルチボディダイナミクスモジュールで更新された機能については, リリースハイライトをご覧ください.
コメント (0)