“デジタルツイン” という用語は単なる誇大宣伝でしょうか. それともモデリングソフトウェアを販売するための新しい角度を得るためのトリックでしょうか. このブログでは, モデル, アプリケーション, デジタルツインの違いについて説明します. この用語はある程度誤用されていますが (元の表現に関連して), その背後には実質的な面があります.
デジタルツインとは?
デジタルツインの使用を検討した最初の業界の1つは航空宇宙産業です. 非常に洞察力のある論文で, Glaessgen と Stargel (参考文献1) は, 車両認証と車両群管理におけるデジタルツインの使用について説明しています. 車両のデジタルツインは, “車両またはシステムの健全性, 残りの耐用年数, およびミッションの成功確率を継続的に予測する” ために使用されます. デジタルツインの説明は次のとおりです. “デジタルツインは, 現在構築されている車両またはシステムの統合されたマルチフィジックス, マルチスケール, 確率的シミュレーションであり, 利用可能な最良の物理モデル, センサーの更新, フリート履歴などを使用して, 対応する飛行ツインの寿命をミラーリングします.”
“デジタルツイン” という用語は, 2011年にミシガン大学の Michael Grieves によって造られました. (参考文献2) この概念は, 2002年に Grieves によってすでに定式化されていましたが, 当時は “ミラーリングされた空間モデル” と呼ばれていました. Grieves の定義では, デジタルツインの概念は, 実際の空間と仮想空間で構成されます. 仮想空間には, 実際の空間から収集されたすべての情報が含まれます. また, 微視的レベルから幾何学的, マクロ的レベルまでの物理デバイスまたはプロセスの高忠実度の説明も含まれます. デジタルツインによって提供される説明は, “物理的な対応物と実質的に区別がつかない” ものでなければなりません. (参考文献3)
M. Grieves によるいくつかの定義
- デジタルツインプロトタイプ (DTP): これは, デジタルツインインスタンスに使用されるプロトタイプです. 詳細な高忠実度モデルは, 通常, このようなプロトタイプの一部になります. ただし, プロトタイプには, 特定の物理デバイスからの測定データとレポートは (まだ) 含まれません.
- デジタルツインインスタンス (DTI): 特定の製品, デバイス, またはプロセスのパラメーター, 制御パラメーター, センサーデータ, および履歴データを含むデジタルツイン. このようなインスタンスは, たとえば, 上記のように, 特定の戦闘機の特定のエンジンの寿命予測を行うことができます.
- デジタルツインアグリゲート (DTA): 独立した固有のデータ構造を持たない可能性のあるデジタルツインのアグリゲート. 代わりに, 構成する DTI が相互にデータを照会する場合があります.
- デジタルツイン環境 (DTE): デジタルツインを操作するための統合されたマルチドメイン物理アプリケーション空間.
デジタルツインの概念における重要な要件は, 実際の物理的な製品, デバイス, またはプロセスの動的で継続的に更新される表現である必要があることです. 実際の空間の静的な表現であってはなりません. 実際の空間と仮想空間は, 製品, デバイス, またはプロセスの製造と操作から廃棄まで接続されています. センサーからの情報, ユーザーからのレポート, および製造と操作のプロセスを通じて収集されたその他の情報は, デジタルツインに継続的に転送する必要があります. 実際のデバイスの設計と操作に使用される可能性のある予測, 制御パラメーター, およびその他の変数は, 仮想空間から実際の空間に継続的に転送する必要があります.

従来のモデルとは対照的に, デジタルツインは現実空間と仮想空間が非常に密接に接続されています.
運用段階 (状況認識も含む) のジェット機のケースを見ると, 飛行機のセンサーと制御システムはデジタルツインに継続的にデータを送信する場合があります. また, パイロットがデータとレポートを送信する場合もあります. デジタルツインは, 制御パラメータとレポートを飛行機に送り返す場合があります. そのため, デジタルツインの特定の側面はリアルタイムで動作し, 飛行機のさまざまなコンピューターシステムに展開される可能性がありますが, 他のより要求の厳しいタスクは実際のデバイスでリアルタイムで動作しない可能性があります. いずれの場合も, 実空間と仮想空間の接続は強力です.
システム, サブシステム, 仮想サブスペース
ジェット機は非常に複雑なシステムであることが想像できます. このような高度なマシンの高忠実度のモデリングおよびシミュレーション環境では, 正確に記述するために, おそらく数百, 場合によっては数千のマルチフィジックスおよびマルチスケールモデルが必要になります.
たとえば, ジェットエンジンは, ジェットのパフォーマンスを最適化し, 燃焼の動作条件を予測および制御するために, 燃焼モデルによって記述される場合があります. CFD モデルは燃焼モデルに結合される場合もあり, 燃焼モデルは燃料分配システムのパイプ流れモデルに結合される場合があります. また, 冷却システムには, 固体の熱伝達と CFD に結合されたパイプ流れモデルを含む特定のモデルが必要になる場合があります. さらに, マルチボディダイナミクスの流体構造相互作用 (FSI) モデルは, 流れ場と流体によって及ぼされる力に基づいて, ジェットエンジンの特定の部品の動きを予測および制御できます. 構造力学解析を実行し, 疲労や温度サイクルに敏感な特定の重要な部品の詳細な微視的材料モデルと結合できます. モデルは, タービン内の流れ, ガス混合物の組成, 温度, ジェットエンジンの回転数, 振動, 速度, および特定のタービンのすべての動作変数の履歴から継続的にデータを取得できます. タービンだけでも, さらに多くの側面があります.
CFD と熱伝達解析により, タービンステーターの応力とひずみを計算できます. 応力により, エンジニアは, 疲労による故障のリスクが生じる前にタービンステーターが受けることができるサイクル数を見積もることができます. デジタルツインインスタンスは, 温度サイクルの数と, ステーターが寿命中に受けた最大応力とひずみを追跡します.
ジェット機の他の部分にも同様に正確な記述が必要です. 飛行制御, 油圧, 着陸装置, その他のサブシステムには, それぞれがマルチフィジックス, マルチスケールモデル, シミュレーションデータ, センサーデータ, 履歴データで構成される独自のデジタルツインが存在する場合があります.

上の図は, 戦闘機の最も重要なサブシステムの一部を示しています. デジタルツインは, 飛行機の各サブシステムのモデル, シミュレーションデータ, 測定データ, レポートを含むさまざまなサブスペースで構成されています. このようなシステムは, デジタルツインアグリゲートで説明できます.
したがって, デジタルツインは, 互いに通信し, 互いに情報を照会する多くの仮想サブスペースとサブシステムで構成される場合があります. たとえば, デジタルツインアグリゲート内です. シミュレーションデータ管理システムは, 別のサブシステムから更新された情報を照会したときにシミュレーションを実行するなど, さまざまなマルチフィジックス, マルチスケールモデル間の緩やかな接続を調整できます. コシミュレーション機能を備えたシステムモデルは, 異なるサブシステム間の双方向の結合を必要とするシミュレーションを実行するために使用できます.
高忠実度モデル, センサーデータ, 履歴データ, およびユーザーレポートは, 製品, デバイス, またはプロセスのさまざまな段階のデジタルツインに使用できます. 上記のジェット機の場合, デジタルツインとその技術は, 設計, 認証, 製造, 運用, 状況認識, および寿命予測中に使用できます. (参考文献1)
軽量モデル
高忠実度のマルチフィジックスおよびマルチスケールモデルには, コンピューターのパワーが必要であり, 結果を出すのに長い計算時間もかかる場合があります. ただし, 物理製品の一部のシステムでは, リアルタイムのシミュレーションデータが必要になる場合があります. たとえば, 上記のジェット機の制御システムやリアルタイム診断などです. 実際のシステムからのクエリに対して非常に高速な応答を必要とする目的の場合, デジタルツインには高速応答を提供できる軽量モデルを組み込む必要があります.
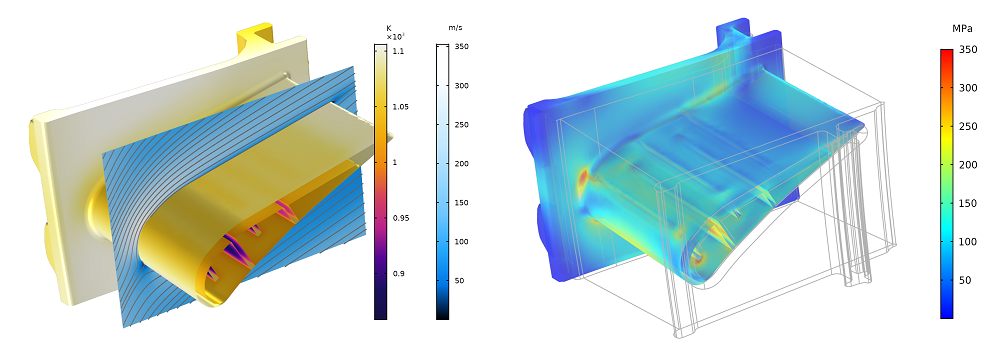
この単純なベンチマーク翼プロファイルの詳細な CFD シミュレーション (LES) は, 比較的強力なデスクトップコンピューターで実行すると数時間かかります. 実際の翼形状での対応するシミュレーションは, スーパーコンピューターで計算すると数時間かかります. このような詳細なシミュレーションは, 乱流モデルからリアルタイムで実行できる非常に単純な集中モデルまで, 一連のより単純なモデルの検証のためにのみ実行できます.
軽量モデルの欠点は, 多くの場合, 有効範囲が限られていることです. デジタルツインは, 高忠実度モデル, センサー, および運用範囲の報告データを使用して軽量モデルを継続的に検証することで, この範囲を広げることができます. 軽量モデルの更新はスケジュール設定でき, 運用範囲が以前に検証された範囲外に近づいたときにトリガーすることもできます.
軽量モデルの利点は明らかです. 高速です. 戦闘機の例を見ると, 軽量モデルはサブシステムとこれらのサブシステムを制御するコンピューターに組み込まれている可能性があります. これらのモデルの継続的な更新と検証は, センサーと報告データを使用して実行できます. また, 空軍施設のスーパーコンピューターとの高速通信を通じて実行することもできます. そこでは, 高忠実度のマルチフィジックスおよびマルチスケールモデルが履歴データとセンサーデータとともに展開されます.
誇大宣伝
上記の議論から, 膨大な量のセンサーデータ, 履歴データ, レポート, シミュレーションデータ, および制御パラメーターを現実空間と仮想空間の間で送信し, 統合リポジトリに保存する必要があるという結論に至ります. 軍事用途の場合, これらすべては, ジェット戦闘機が軍事通信システムを使用して空軍施設のスーパーコンピューターと通信するクローズドシステム内で行われます. 民間用途の場合, 通信と計算の必要性により, デジタルツインと組み合わせた モノのインターネット (IoT), 5G ネットワーク, 機械学習, クラウドコンピューティングに関する話題が盛り上がっています. クローズドシステム内の同様の要件は, 軍事用途にも当てはまります.
これらの技術は, デジタルツインのコンセプトと組み合わせることで真の価値を生み出します. 単なる誇大広告ではありません!
民間アプリケーションの場合, IoT がセンサーデータを通信し, 検証データと制御データをデバイスに組み込まれたシステムに送り返すことができることが非常に重要です. 機械学習 (人工知能とも呼ばれる) を使用すると, サブシステム, センサー, さまざまなモデルを照会または更新するタイミングを決定し, デジタルツインと物理デバイスまたはプロセスを忠実に維持できます. クラウドコンピューティングは, 複雑なモデル方程式を解いたり, モデルを検証したり, 測定データをフィルタリングして処理したり, 履歴データを保存して処理したり, ユーザーまたは AI からのコマンドに応じてさまざまなシステムやサブシステムを照会したりするために使用できます. したがって, このコンセプトには実際の価値があり, 単なる誇大宣伝ではありません.
COMSOL Multiphysics® とデジタルツイン
COMSOL Multiphysics® ソフトウェアは, デジタルツインの高忠実度の説明を構築するために必要なマルチフィジックスモデルとマルチスケールモデルを提供できることは明らかです. さらに, COMSOL® ソフトウェアには, 測定データとさまざまなパラメーター推定, 最適化, および制御方法を組み合わせて, これらのモデルを制御および検証する機能があります. COMSOL Multiphysics は, モデル次数低減の方法 (参考文献4) と, 軽量モデルの作成と検証に使用できる集中モデルメソッドも提供します.
COMSOL Multiphysics モデルには, 非常に密接に結合できるコンポーネントを含むシステムをモデル化するために, 複数のモデルコンポーネントを含めることもできます. システムモデルは, たとえば, 燃料分配システムのパイプ流れモデルコンポーネント, 冷却システムのコンポーネント, 1つまたは複数の構造モデルコンポーネント, 燃焼, およびエンジンのさまざまな部分の CFD モデルコンポーネントを含むジェットエンジンのモデルです.
COMSOL Multiphysics では, Java® で使用する COMSOL API を使用して, 現実空間と仮想空間を緊密に連携させることができます. このようなプログラムに組み込まれた Java® モデルファイルは, たとえばダイナミックリンクライブラリファイル (dll ファイル) を使用して, 外部システムと通信できます. Java® エコシステムを活用することで, 仮想空間を ウェブサービス (Tomcat 内で実行される Java® ベースのウェブサービスなど) として実装することもできます. このウェブサービスでは, たとえば, 現実空間と通信するための表現状態転送アプリケーションプログラミングインターフェース (REST API) を提供できます. これは, デジタルツイン環境の中心的な部分になります.

Apache Tomcat を実行するウェブサービスは, 物理デバイスと COMSOL アプリケーションを緊密に連携させてデジタルツインを作成するために使用できる REST API を提供します. タービンの写真は Sanjay Acharya 氏によるもので, 本人の作品です. CC BY-SA 3.0 ライセンス, Wikimedia Commons 経由.
COMSOL Server™ を使用すると, 入力ファイルまたは演算子の更新によってトリガーされるシミュレーションデータを照会できるモデルとアプリケーションを管理できます. また, COMSOL Compiler™ を使用してコンパイルされたアプリケーションを使用すると, 入力データを受信し, 制御パラメーターとレポートの形式で出力データを生成することができます. COMSOL Server™ のアプリケーションとコンパイルされたアプリケーションの唯一の制限は, 実行中に入力を更新できないことです (入力データをリアルタイムで継続的に受信できる, Java® で使用する COMSOL API を使用した上記の例とは対照的です). 入力は実行時に行われますが, 出力は実行中に継続される場合があります. したがって, COMSOL Server™ とコンパイルされたアプリケーションの一般的な使用法は, 比較的強力なコンピューターで実行される高忠実度の記述です. これらのアプリケーションは, デジタルツイン内でクエリされ, 製品, デバイス, またはプロセスに埋め込まれる可能性のある軽量モデルの検証用のデータを生成する場合があります.
おわりに
上記の議論から, デジタルツインの概念は単なる誇大宣伝ではないと結論付けることができます. 設計, 製造, 運用, さらには廃棄中に製品, デバイス, またはプロセスを理解, 予測, 最適化できることの価値は非常に大きいです. たとえば, 戦闘機の場合, デジタルツインは, 製品のライフサイクルを通じて物理的な対応物に追従し, 設計, 制御, 運用パラメーター, 安全性と寿命予測を比較的低コストで提供します.
COMSOL Multiphysics, COMSOL Server™, COMSOL Compiler™ はすべて, マルチフィジックス, マルチスケール, 軽量モデル, およびデジタルツインの検証と制御方法を提供できます. これらはすべて, 実際のマルチフィジックス機能によって提供される現実空間と仮想空間の間の可能な限り最高の忠実度で実現されます.
次のステップ
COMSOL Multiphysics モデルとシミュレーションアプリケーションが, 組織でのデジタルツインの使用にどのように適合するかについて詳しくご覧ください. ソフトウェアを評価するには, 以下のボタンからお問い合わせください.
参考文献
- E. Glaessgen and D. Stargel, “The Digital Twin Paradigm for Future NASA and U.S. Air Force Vehicles,” 53rd Structures, Structural Dynamics and Materials Conference, 2012.
- M. Grieves, “Origins of the Digital Twin Concept”, working paper, Florida Institute of Technology, 2016.
- M. Grieves, “Digital Twin: Manufacturing Excellence through Virtual Factory Replication,” Michael W. Grieves, LLC, 2014.
- D. Hartmann, M. Herz, and U. Wever, “Model Order Reduction a Key Technology for Digital Twins”, Reduced-Order Modeling (ROM) for Simulation and Optimization, pp. 167–179, Springer, 2018.
OracleおよびJavaはOracleおよびその関連会社の登録商標です.
コメント (0)