
自転車のペダルは, 左のペダル軸のねじ山が左巻きで, 右の軸が右巻きであるため, 取れないようになっています. ベアリングトルクはペダルのネジを緩めるように作用するため, より強い効果が現れ, ペダルは脱落しません. つまり, 機械的な歳差運動の効果です. このブログでは, 機械的な歳差運動について説明し, 接触解析とマルチボディダイナミクスを含む自転車モデルでデモを行います.
テクニカルサイクリストが気付く特異性
自転車に乗るのが初めてでも, 歩くことができるようになってから熱心なサイクリストでも, 自転車のペダルの設定方法に奇妙な点があることに気付いたかもしれません. 自転車の左ペダルには左ねじ, 右ペダルには右ねじがあります.

この観察は多くの人が不思議に思うペダルが, それぞれの側でそれぞれの方向にねじ込まれているのに, しばらく乗っても取れないのはなぜか.
自転車を自分で修理しなければならなかったことがある人なら, もう1つ質問があるでしょう?
機械的歳差運動とは?
ボルトがボルト軸の周りを回転する力を受けると, 機械的な歳差運動が発生します. 回転力により, ボルトは力のダイナミクスとは反対方向に回転します. 以下のアニメーションは, この基本原理を示しています.
ボルト (内側の円) には, 反時計回りに回転する力 (黒い矢印) がかかります. これにより, ボルトが時計回りに回転します (灰色の矢印).
この簡略化された 2D アニメーションでは, ねじ山公差が10 % の剛体ボルトを想定しています. これにより, 力が1回転するたびにボルトが36° 回転します. 実際には, 公差ははるかに小さく, ボルトは弾力性があり, 面外寸法に大きな力の変動があります.
今すぐ簡単な機械的な歳差運動のトリックを試してみてください. ペンを手にゆるく持ち, もう一方の手でペンの先を円を描くように動かします. これにより, ペンが回転の反対方向にねじれます.
自転車ペダルの接触解析付きマルチボディダイナミクス
ボルト, ボルトにかかる力, およびボルトが取り付けられているクランクアームのみをモデル化することで, 基本原理を捉えることができます. このようなアニメーションは回転座標系で発生し, 加えられた力のダイナミクスの正確性を検証することは困難です.
代わりに, バイク全体を考慮したマルチボディダイナミクスモデルを構築できます. ボルト軸のみが弾性であると見なされる場合, マルチボディダイナミクスモデルの計算コストは無視できるほど増加し, 固定座標系での力のダイナミクスを可視化できます.
クリップオンで自転車をこぐと, ペダルには下向きと上向きの力がかかります. 完成した自転車をシミュレートするモデルは, 下のアニメーションに示すように, ペダルが1回転するたびに力が半円を2回移動することを明らかにします.
アニメーションは, 自転車のペダルをこぐと右ペダルの車軸が時計回りに回転する様子を示しています. これは, 車軸と一緒に回転するフレームの右側から見た場合です. ボルトの端にある回転する色は, 対数スケールで接触圧力を示しています.
接触解析では摩擦を使用することが重要であるため, モデルでは摩擦係数を0.1と想定しています.
また, このモデルでは, 無視できるねじ公差とボルト軸の現実的な剛性を想定しています. 力の現実的な値は, 機械的な歳差運動によって非常に小さな回転を引き起こします. そのため, 可視化のために, 力のピークは50 kN であり, 現実的な値の50 ~ 500倍です. これは, 上のアニメーションでボルトの変形を見ると明らかです. 力が大きいにもかかわらず, 下図に示すように, 歳差運動はペダル1回転あたり約1° に過ぎません.
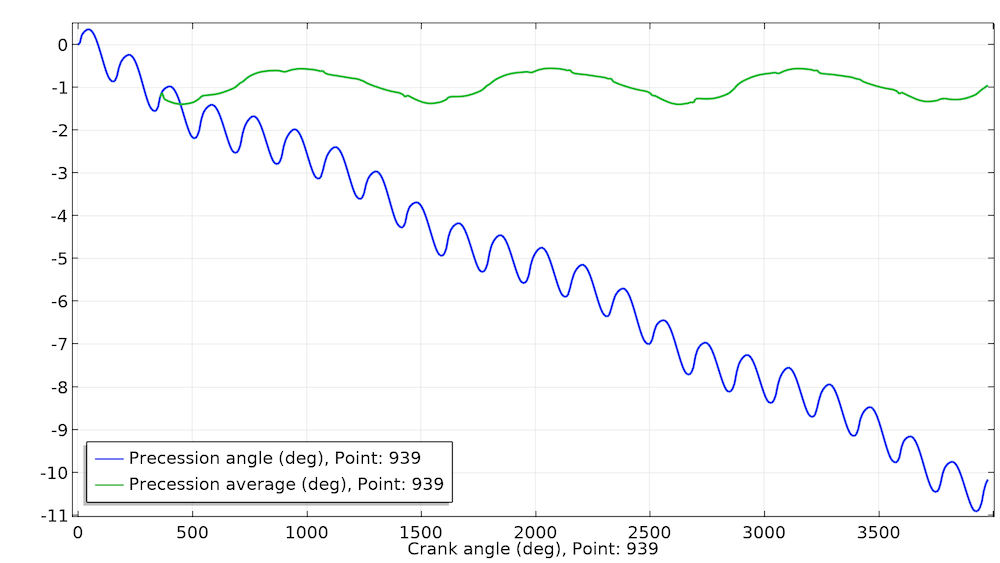
クランクフレームのボルトの角度は青で示され, 前の回転に対するこの角度の値は緑で示されます. 緑の曲線の変動は, 数値ノイズによるものです. 緑の曲線の平均値は0.95° .
自転車のペダルを緩める必要がある場合?
ペダルを緩める必要がある場合は, 次のことを覚えておいてください:
- 右で締めて, 左で緩めてというフレーズは, 右側のみに適用されます
- ベアリングの力でボルトが緩むので, スパナでボルトをつかみ, それを使って自転車を前方にペダルを踏むことができます
- 機械的な歳差運動がボルトをねじ込むので, 固定ギアの設定に切り替えて, 自転車を長時間後方にペダルを漕ぐことができます (推奨されません).
自分で試す
ここで紹介するモデルは, マルチボディダイナミクスインターフェースを使用します. これは, 異なる座標系での変形の計算をサポートし, 異なる座標系でのアニメーションの作成を簡素化します. この機能は, COMSOL Multiphysics® バージョン 5.5 の新機能です.
マルチボディダイナミクススタディと自転車のペダルの接触解析を自分で実行してみてください. 下のボタンをクリックしてモデルを入手してください.
コメント (0)