
以前のブログでは, COMSOL Multiphysics® ソフトウェアのパーツライブラリに組み込まれているジオメトリパーツを使用して, ローラーチェーンスプロケットアセンブリのパラメトリックジオメトリを簡単に構築する方法について説明しました. チェーンドライブモデリングブログシリーズのこの第2部では, このジオメトリを入力として使用して, チェーンドライブシステムを分析するためのモデル設定を自動的に生成する方法を学習します.
チェーンドライブモデリングの課題は?
すでに説明したように, チェーンドライブは, 1つまたは複数のスプロケットに巻き付けられた複数のリンクのアセンブリであり, マシンの1つのコンポーネントから別のコンポーネントに電力を転送するために使用されます. さまざまなタイプの相互作用を持つコンポーネントが多数あるため, このようなシステムのダイナミクスをシミュレートするのは簡単ではありません. チェーンドライブシステムのモデリング中に直面する可能性のある課題を理解するために, モデリングの観点からチェーンドライブメカニズムを解析してみましょう.
金属またはその他の硬い材料でできており, 操作中に変形が無視できるチェーンリンクまたはスプロケットを考えてみましょう. このような場合, それらを剛体と慎重に見なすことができます. COMSOL Multiphysicsで剛体をモデル化するには, 各リンクに剛体ノードを追加する必要があります. モデリング中に考慮すべきもう1つの重要な側面は, リンクがジョイント軸を中心に回転する機能です. これにより, リンクは歯付きスプロケット上を移動およびスライドできます. 2つのリンク間のこの無制限の回転をモデル化するには, 各リンク境界に2つのアタッチメントノードと, それらの間に1つのヒンジジョイントノードが必要です. 同様に, スプロケットとリンク間の接触ダイナミクスをモデル化するには, 各スプロケットとリンクの外側の境界の間に接触ノードを追加する必要があります.
複数のチェーンリンクとスプロケットを備えたシステムの場合, 適切なパラメーター(たとえば, 各ヒンジの軸と回転の中心)を使用してこのようなフィジックスノードを手動で追加することは, ミスをする可能性が高い疲れる作業です.
マルチボディダイナミクスモジュールを使用してチェーンドライブをモデル化する方法
チェーンドライブシステムをすばやく設定するために, COMSOL Multiphysicsはバージョン5.5で新機能を導入しました. マルチボディダイナミクスインターフェースで利用可能なチェーンドライブ機能を使用すると, ボタンを1回クリックするだけで, システムの解析に必要な複数のフィジックスノードを簡単に生成できます. 入力パラメーターのセットを使用して, チェーンリンク間の弾性ブッシングの存在, リンクジョイントでの損失の発生など, 一般的に観察されるいくつかの効果をシミュレートすることもできます. 次のセクションでは, チェーンドライブ機能について2つの興味深い例の中で詳細を説明します.
チェーンドライブモデルを設定するための前提条件は, 現実的なシステムジオメトリです. チェーンジオメトリは, COMSOL Multiphysics または任意のCADツールで作成できます. チェーンスプロケットアセンブリのジオメトリが利用可能になったら, モデリングの次のステップは, マルチボディダイナミクスインターフェースにチェーンドライブノードを追加することです.
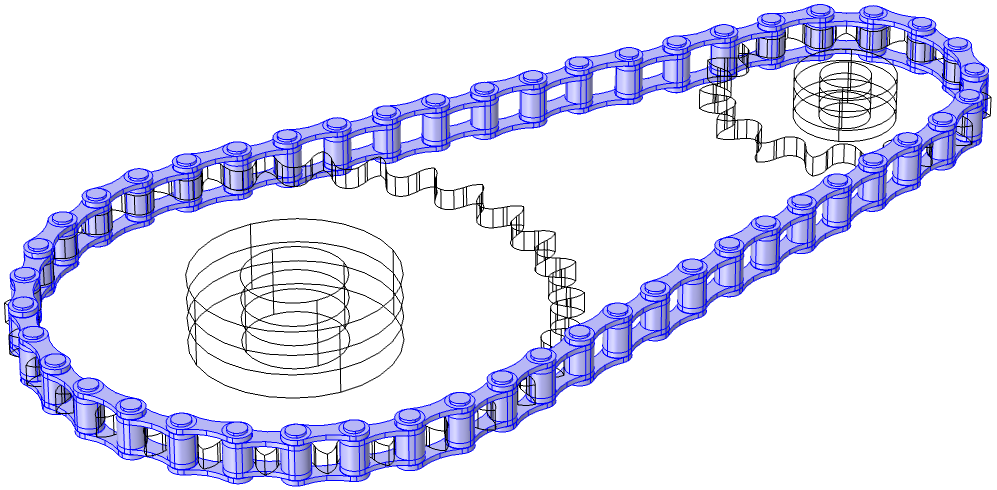
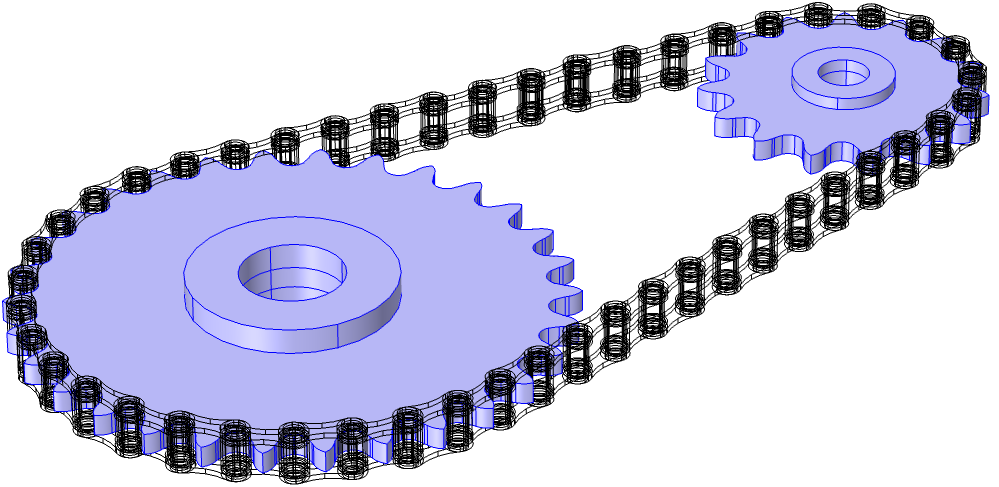
チェーンドライブノードを追加すると, モデルビルダーは次の図のようになります.

パーツライブラリのローラーチェーンスプロケットがジオメトリのパーツインスタンスとして追加されたモデルビルダー. このパーツインスタンスは, マルチボディダイナミクス インターフェースのチェーンドライブノードによって入力として取得され, さまざまなフィジックスの機能を作成します.
チェーンドライブノードは, 設定ウィンドウの上部にあるリンクとジョイントの作成ボタンを使用して, モデルの設定を自動化し, 簡素化します. このボタンをクリックすると, 剛体ドメイン, アタッチメント, ヒンジジョイント, 接触などのフィジックス機能ノードを含む複数のノードグループがモデルビルダーに追加されます. リンクとジョイントの作成ボタンを押す前に設定する必要のあるさまざまな入力があることに注意することが重要です. これらの入力は, 自動生成されたフィジックスノードに適切な選択やその他のパラメーター値を設定するために必要です. 次のセクションでは, さまざまな入力と, さまざまなモデリング要件に合わせてそれらを調整する方法について説明します.
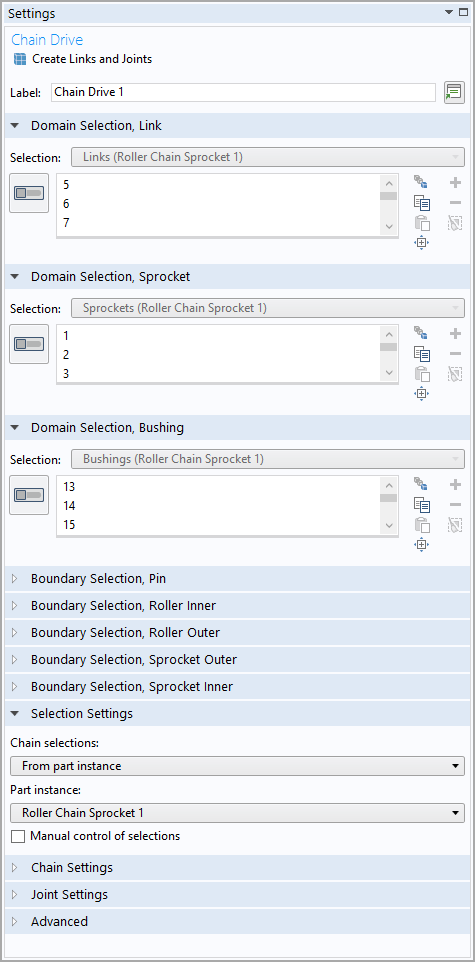
チェーンドライブノードの選択設定
チェーンドライブノードが複数のフィジックスノードを生成するために必要な最も重要な入力は, ドメインと境界の選択のセットです. これらの選択は, チェーン選択入力を使用して手動または自動で入力できます. チェーンの選択がユーザー定義に設定されている場合は, ローラーチェーンジオメトリのさまざまなコンポーネントで適切な選択を作成し, それぞれの選択入力フィールドに入力する必要があります.
この手動による方法の最も簡単な代替方法は, パーツインスタンスからオプションを使用することです. チェーンの選択がパーツインスタンスからに設定されている場合, パーツインスタンス入力には, ジオメトリノードでローラーチェーンの使用可能なすべてのジオメトリが一覧表示されます(下の図を参照). 以前のブログで述べたように, ローラーチェーンスプロケットアセンブリの組み込みパーツには, 事前定義された選択肢のセットが含まれています. 特定のローラーチェーンジオメトリが選択されると, 事前定義されたすべての選択が自動的に識別され, チェーンドライブに必要な入力として使用されます. 選択入力は自動的に設定されるため, 編集不可の状態になります. ただし, 必要に応じて, 選択の手動制御チェックボックスを選択して編集できます.
チェーンドライブで使用できるさまざまなドメインおよび境界選択入力は次のとおりです.
ドメイン選択入力
次の図に示すように, チェーンドライブには最大3つのドメイン選択入力を含めることができます.
- ドメインの選択, リンク
- ドメインの選択, スプロケット
- ドメインの選択, ブッシング
チェーンドライブノードのさまざまなドメイン選択入力.
すべての選択入力が常に使用可能である必要はありません. むしろ, 他のモデルパラメーターに応じて条件付きで表示されます. たとえば, チェーン内のすべてのリンクを剛体ボディとしてモデル化する場合は, リンクタイプ入力を剛体に設定します. この場合, 選択入力ドメイン選択, リンクが使用可能になります. この選択入力を使用して, 各リンクプレートに 剛体ドメインノードが作成されます. パーツライブラリのジオメトリを使用する場合, Links という名前の組み込みドメイン選択がここで自動的に選択されます. 独自のジオメトリを使用している場合は, すべてのリンクプレートを含むドメイン選択を入力する必要があります.
剛体ドメインノードの作成に使用されるすべてのリンクプレートの選択.
剛体スプロケットのモデリングには, 選択入力ドメイン選択, スプロケットが使用されます. リンクドメインの選択と同様に, この入力は, スプロケットタイプが剛体に設定されている場合にのみ使用できます. パーツライブラリのジオメトリを使用する場合, スプロケットという名前の組み込みドメイン選択が自動的に選択されます. 独自のジオメトリを使用している場合は, 両方のスプロケットドメインを含むドメイン選択を入力する必要があります.
剛体ドメインノードの作成に使用される両方のスプロケットの選択.
3番目のドメイン選択入力であるドメイン選択, ブッシングは, 剛体リンク間の弾性ブッシングの効果を含める場合に使用されます. このような場合は, リンクタイプを弾性ブッシング付き剛体に設定してください. 追加の選択入力, つまりドメイン選択, ブッシングが表示され, ブッシングドメインを入力できます. リンクを固定したまま, これにより, リンク間のすべてのブッシングドメインに線形弾性材料ノードが追加されます. パーツライブラリのジオメトリを使用する場合, ブッシングという名前の組み込みドメイン選択が自動的に選択されます. 独自のジオメトリを使用している場合は, すべてのブッシングドメインを含むドメイン選択を入力する必要があります.
線形弾性材料ノードの作成に使用されるブッシングドメインの選択.
リンクやスプロケットの弾性変形とそれに続く応力分布に関心がある場合は, システムコンポーネントを弾性体としてモデル化する必要があります. これは, リンクタイプとスプロケットタイプの値を弾性に設定することで可能になります. このような場合, 厳密なドメインを追加する必要がないため, 対応するドメイン選択入力は非表示になります. ボディは, マルチボディダイナミックスインターフェースでデフォルトの材料モデルである線形弾性材料を使用してモデル化されます.
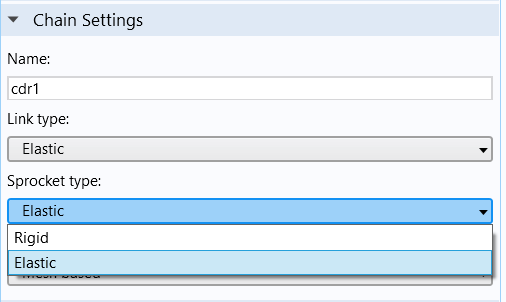
チェーンドライブノードのチェーン設定セクション. 剛体または弾性ボディを作成するためのパラメーターがあります.
境界選択入力
チェーンドライブノードが持つことができる境界選択入力は最大5つです. ドメイン選択入力と同様に, 一部のモデリング条件では, 一部の境界選択入力が必要ない場合があります. それらは非表示になり, 残りは設定ウィンドウで利用できるようになります.
チェーンドライブの境界選択入力は次のとおりです.
- 境界の選択, ピン
- 境界の選択, ローラー (内側)
- 境界の選択, ローラー (外側)
- 境界選択, スプロケット (外側)
- 境界の選択, スプロケット (内側)


チェーンリンク(左)とスプロケット(右)で利用可能なさまざまな境界選択入力.
境界選択入力は, 主に, アタッチメント, ヒンジジョイント, 接触などのフィジックスノードを作成するために使用されます.ジョイントと接触のモデリングについて説明する次のセクションでは, さまざまな境界選択入力を使用して, 対応する機能の選択を作成する方法を説明します.
チェーンドライブのジョイント設定
チェーンでは, 隣接するリンクプレート(ローラープレートとピンプレート)間の接続は, それらの間の相対回転が制限されないように設計されています.この動作は, ジオメトリの平面に垂直な軸を持つヒンジジョイントを使用してモデルに取り込むことができます.この目的には, 選択入力の境界選択, ピンと境界の選択, ローラー (内側)が使用されます. アタッチメントノードは, 嵌合するピンプレートの外側の境界とローラープレート (内側)の境界のそれぞれに作成されます.これらのアタッチメントは, それらの間に作成されたヒンジジョイントのソースおよび行先入力として使用されます.
アタッチメントノードの作成に使用されるピンプレート境界の選択. ローラー (内側)の境界の選択も同じ幾何学的位置にあります.
自動生成されたアタッチメントノードとヒンジジョイントノードのいくつかの重要なパラメーターを簡単に制御および設定するために, チェーンドライブノードはジョイント設定セクションにいくつかの設定を提供します. たとえば, 添付ファイルの重要なパラメーターの1つは, 接続タイプです. 剛体またはフレキシブルのいずれかです. チェーンドライブノードのアタッチメントタイプ入力を剛体またはフレキシブルに変更することにより, すべてのアタッチメントノードの接続タイプを目的の値に設定できます.
同様に, 一度に複数のヒンジジョイントノードの軸と弾性の値を設定するには, スプロケット軸とジョイントタイプの入力を使用します. 組み込みパーツをジオメトリに使用している場合, すべてのジョイントの軸はパーツのスプロケット軸と同じになります. これは, 方向を指定するか, スプロケット軸に平行なエッジを選択することで変更できます. ジョイントタイプを弾性に設定することにより, アタッチメントサーフェス間に弾性接続を追加することもできます.
チェーンドライブノードを介してジョイントに含めることができるもう1つの重要な側面は, 回転減衰です. 回転減衰を含めるチェックボックスをオンにし, 減衰係数の適切な値を設定することにより, すべてのジョイントに粘性減衰の効果を組み込むことができます.
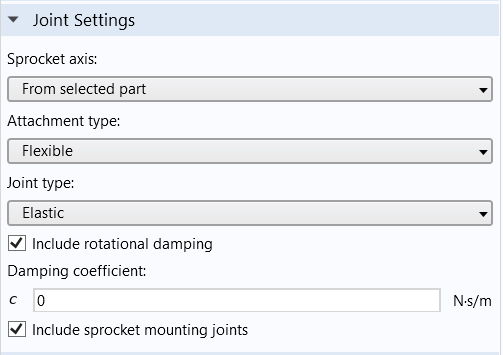
チェーンドライブノードのジョイント設定セクション. ヒンジジョイントノードとアタッチメントノードを制御するためのパラメーター.
チェーンドライブシステムが一部の外部シャフトに取り付けられている場合, それらを接続するためにスプロケットにアタッチメントとヒンジジョイントを作成する必要がある場合があります. ジョイント設定のチェックボックスが選択されている場合, チェーンドライブノードは, スプロケットごとにアタッチメントノードとヒンジジョイントノードを自動的に作成します.
チェーンドライブの接触のモデリング
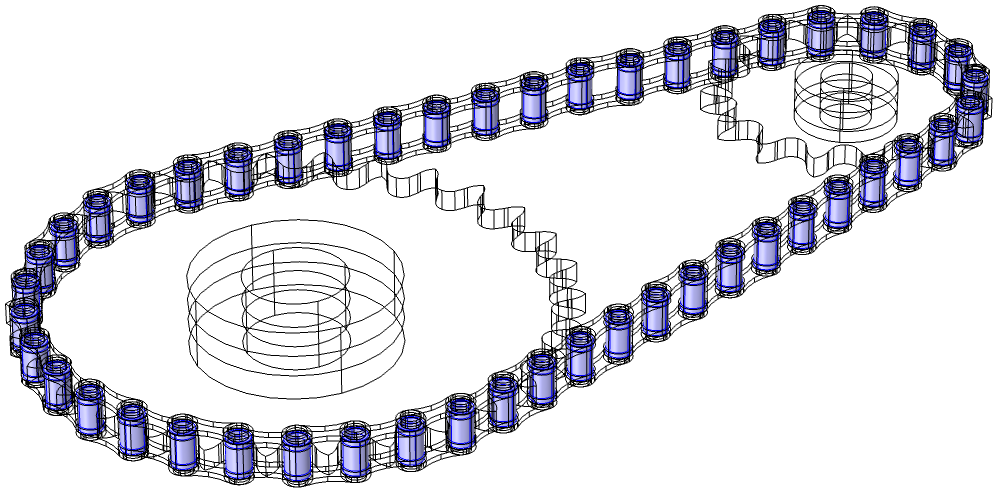
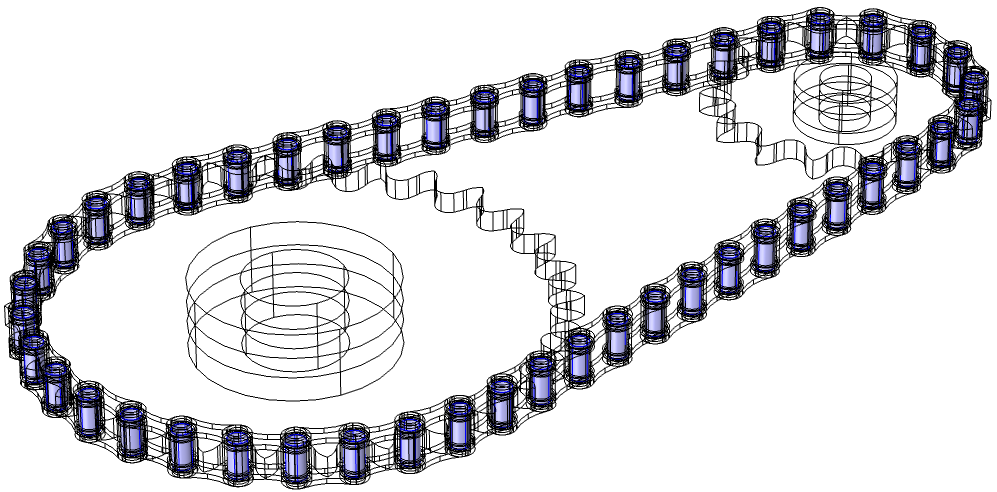
チェーンがスプロケットの上を移動すると, チェーンリンクとスプロケットの外側の境界が接触します. したがって, チェーンドライブシステムの接触ダイナミクスをモデル化するには, ローラープレートとスプロケットの外側の境界を選択する必要があります. この目的のために, 2つの選択入力, つまり境界選択, ローラー (外側)と境界選択, スプロケット (外側)が使用されます.
メッシュベースの方法またはローラーセンターベースの方法のいずれかを使用して, 接触をモデル化します.メッシュベースの方法では, ローラーとスプロケット の外側の境界の間に接触ペアが作成され, ペナルティ定式化のある接触ノードが追加されて, 接触ペアの表面間の接触力が計算されます.
ローラーとスプロケットの外側の境界間の接触ペア.
計算コストの高いメッシュベースの方法を使用する代わりに, ペナルティベースの接触方法のより高速なバージョンを使用して, 剛性ローラープレートを備えたシステムを解析できます. この方法は, ローラーセンターベースの方法と呼ばれます. この方法では, 一般的な押出し演算子を使用して, ローラーの外側の境界とスプロケット上の空間法線の方向の最も近い点との間のギャップを計算します.
ここまでで, チェーンドライブノードが親ノードとして機能し, 他の複数のフィジックスノードを生成してそれらのパラメーター値を設定することを理解しました.前述のように, フィジックスノードの自動作成は, リンクとジョイントの作成ボタンから開始されます. 子ノードは親チェーンドライブノードからパラメーター値の一部を取得するため, すべてのパラメーターに適切な値を設定した後でのみボタンをクリックしてください. フィジックスノードの自動作成後, チェーンドライブノードの選択またはその他のパラメーターを変更すると, 関連するフィジックスノードの設定も更新する必要があります. 既存のフィジックスノードの設定を更新するか, 新しいフィジックスノードを作成するには, リンクとジョイントの作成ボタンをもう一度クリックします. このような場合はすべて, 更新が必要な場合は常に, チェーンドライブノードの下に警告メッセージが追加されて通知されます.
COMSOL Multiphysics® でのローラーチェーンスプロケットアセンブリのダイナミクスのシミュレーション
これまで, COMSOL Multiphysics が, ジオメトリの構築とチェーンドライブシステムのモデル設定を簡素化するための簡単なソリューションを提供する方法を見てきました. これは, ローラーチェーンスプロケットアセンブリのダイナミクスとローラーチェーンスプロケットアセンブリモデルの応力解析で示されています.
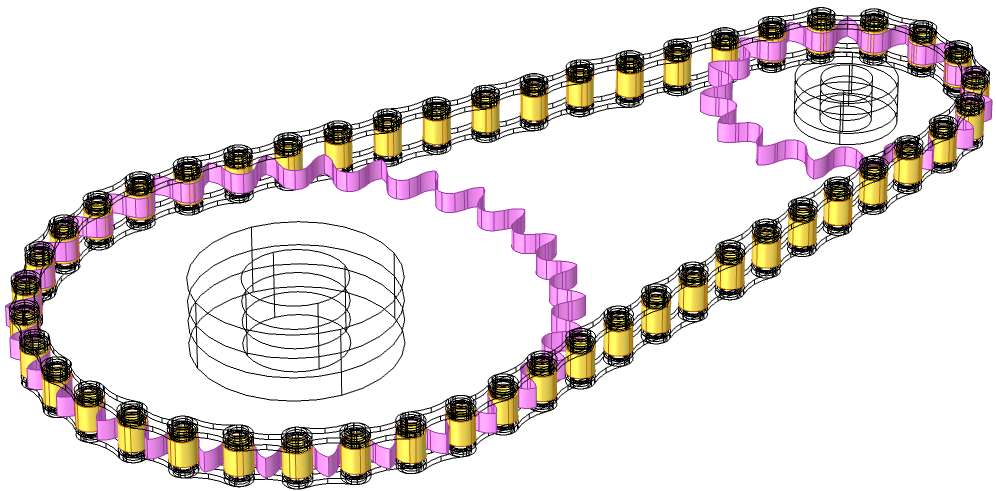
ローラーチェーンスプロケットアセンブリモデルのダイナミクスは, 2Dで2つの剛体スプロケットに剛体リンクが巻き付けられたチェーンのダイナミクスをシミュレートします. チェーンスプロケットアセンブリのジオメトリは, 組込みのジオメトリパーツを使用して作成され, モデル全体は, マルチボディダイナミクスインターフェースのチェーンドライブノードを使用して設定されます. システムは, ドライバースプロケットで規定された角速度によって作動します. 一時的な解析を実行して, 被駆動スプロケットが反作用する外部トルクによってアンロードまたはロードされたときのシステムのダイナミクスを理解します.
2Dでモデル化されたチェーンリンクとスプロケットの変位.
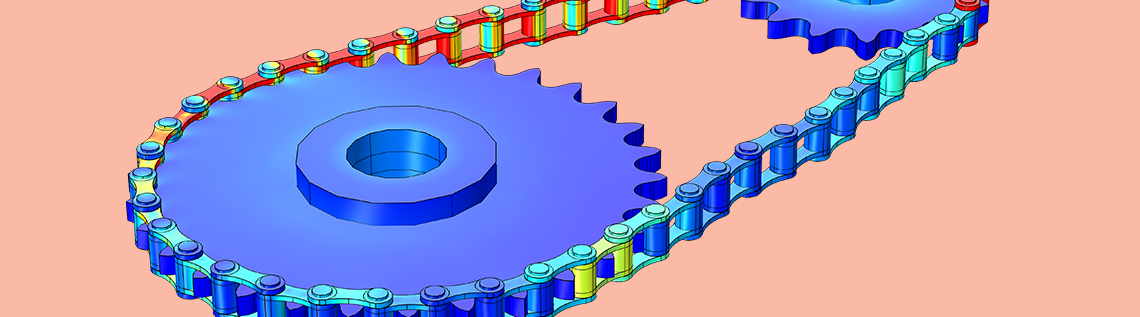
ローラーチェーンスプロケットアセンブリモデルの応力解析は, チェーンスプロケットアセンブリの3Dモデルを設定する方法を示しています. すべてのコンポーネントは弾性であると想定され, システムのダイナミクスはスプロケットでの角速度を介して開始されます. チェーンリンクはモーションを2番目のスプロケットに伝達し, そのスプロケットは反作用する外部トルクを受けます. さまざまなアセンブリコンポーネントの荷重経路, 接触力, および応力分布の過渡解析を実行します.
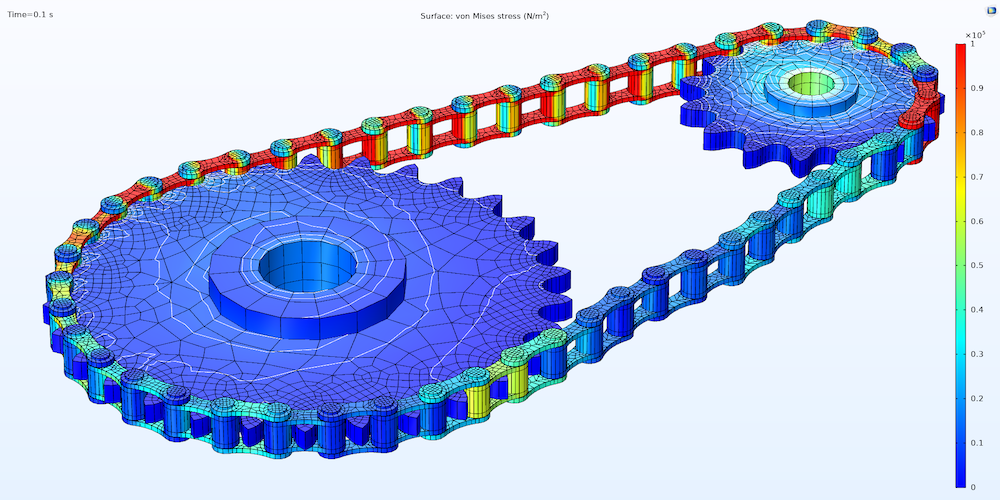
Von Mises stress distribution in the chain drive at t = 0.1 sec.
次のステップ
COMSOL Multiphysics Part Library の組込みジオメトリパーツを使用して, 独自のチェーンドライブジオメトリを構築してみてください. チェーンドライブ機能を使用してモデルの設定を自動化し, モデリングワークフローの容易さを確認します. また, COMSOL Multiphysics バージョン5.5以降のマルチボディダイナミクスモジュールで利用可能なその他の新機能と改善点についても説明します.
コメント (0)