マルチボディダイナミクスモジュールアップデート
マルチボディダイナミクスモジュールのユーザー向けに, COMSOL Multiphysics® バージョン5.6には, 剛体の接触と摩擦, クリアランスジョイント, および自動ジョイント作成をモデル化するための新しい方法が装備されています. このマルチボディダイナミクスの更新については, 以下をご覧ください.
剛体の接触と摩擦
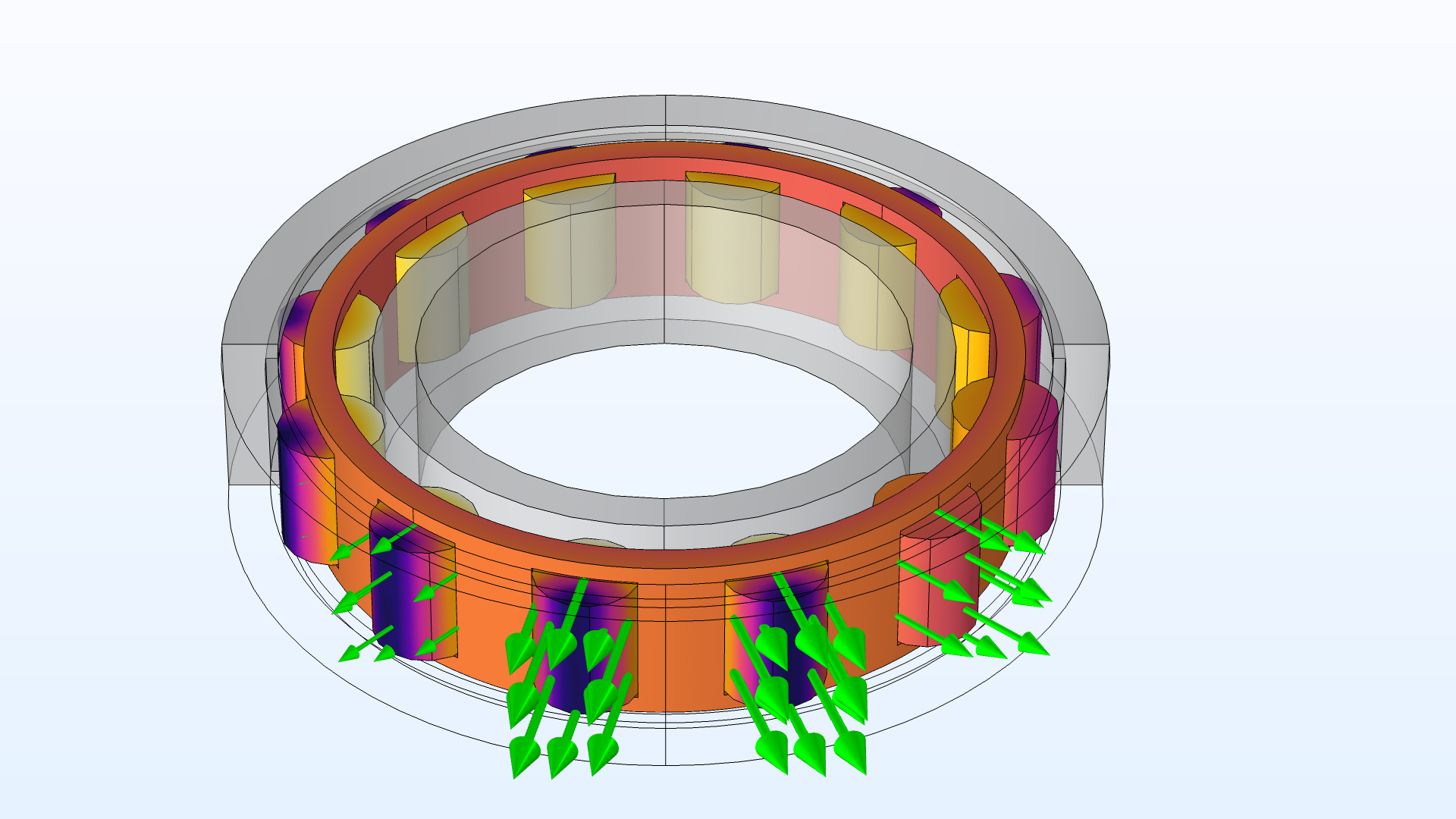
剛体間の接触をモデル化するための新しい方法が, マルチボディダイナミクスインターフェースに追加されました. 新しい方法は, 剛体接触ノードから利用でき, 標準形状の剛体間のメッシュレス接触をモデル化することを目的としています. このバージョンでは, 球形-球形および球形-任意のタイプの接触が可能です. 前者では, 球の1つを中空にし, 内側の凹状の境界を接触面とします. 接触の定式化は, ペナルティまたはペナルティ, 動的のいずれかとして選択でき, 摩擦力は、時間依存の研究に利用できる滑らかで数値的にロバストな連続摩擦法則を使用してモデル化されます. この機能は Dynamics of a Cylindrical Roller Bearing チュートリアルモデルで使われています.
クリアランスジョイント
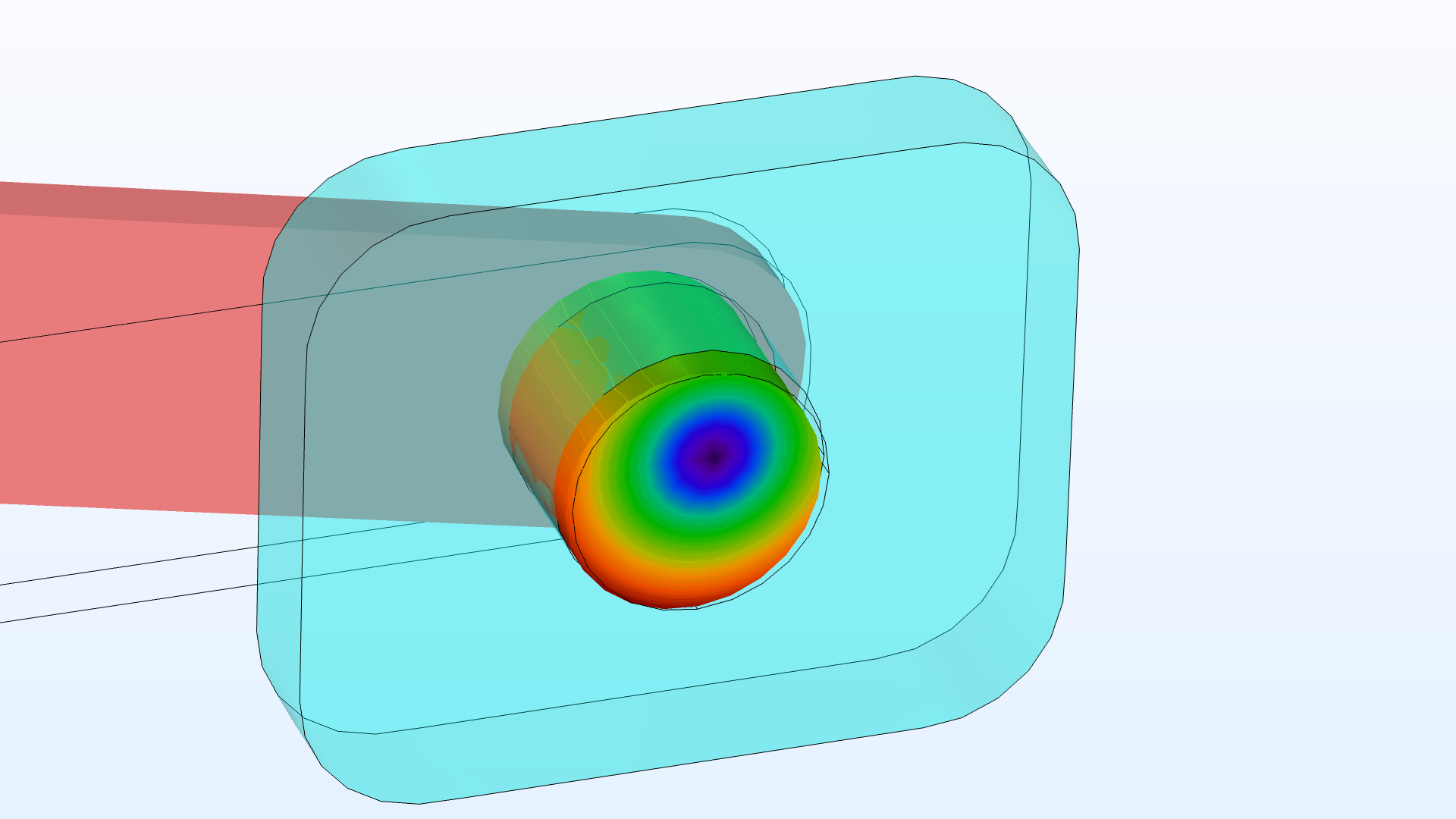
実際には, ジョイントは常に完全にフィットするとは限りませんが, 2つの部品間にある程度のクリアランスがあります. 不完全なジョイントをそのようにモデル化するには, マルチボディダイナミクスインターフェースの新しいクリアランスジョイントノードを使用できます. この新しいジョイントタイプは, クリアランス距離内のすべての並進自由度に沿った運動を可能にします. ペナルティ法は, 距離の制約を適用するために使用されます. また, 接続された2つの部品間の回転自由度に沿った運動を可能にし, 3D ではボールジョイントまたは 2D ではヒンジジョイント として動作します. この機能は Slider Crank Mechanism with Joint Clearance のチュートリアルモデルで使用されています.
ジオメトリからの自動ジョイント作成
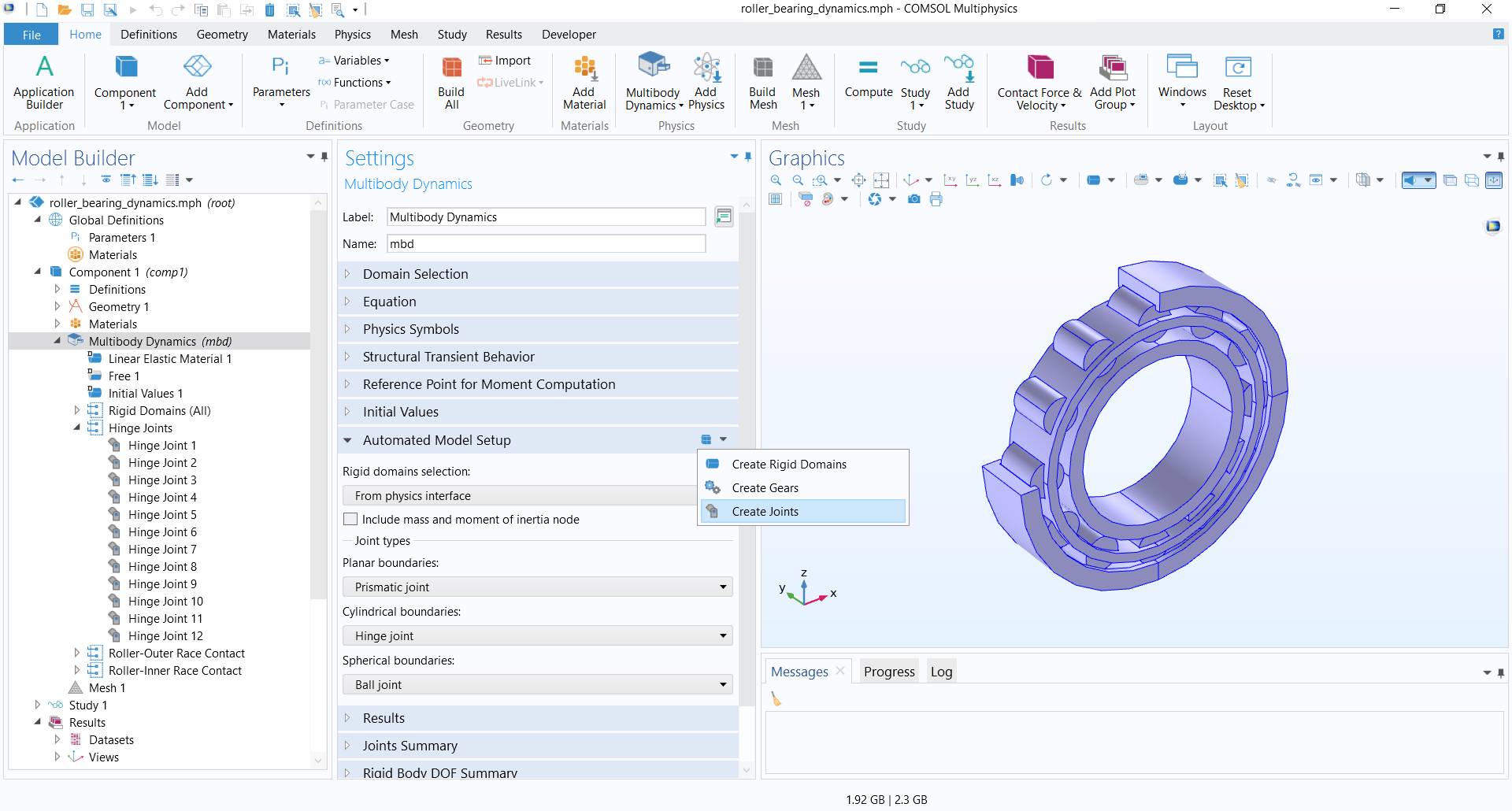
ジオメトリアセンブリからジョイントを自動的に作成できるようになりました. これにより, 大規模なマルチボディシステムのモデル設定が簡単になります. マルチボディダイナミクスインターフェースの自動モデル設定セクションに, 新しいジョイントの作成ボタンが追加されました. このボタンは, アセンブリ内のジオメトリックオブジェクトのジョイントを自動的に作成し, それらの間にIDペアを形成します. デフォルトでは, プリズム, ヒンジ, およびボールジョイントは, それぞれ平面, 円筒, および球の境界に対して作成されます. 特定のタイプの境界に適した他のジョイントを選択することもできます. この方法で作成されたジョイントには, ソース, 行先, 中心, および軸の情報が自動的に割り当てられます. 次のモデルで使用されているこの機能を確認できます:
- three_-_cylinder_reciprocating_engine
- reciprocating_engine_with_hydrodynamic_bearings
- slider_crank_mechanism_with_joint_clearance (new model)
- dynamics_of_a_cylindrical_roller_bearing (new model)
集中構造接続カップリング
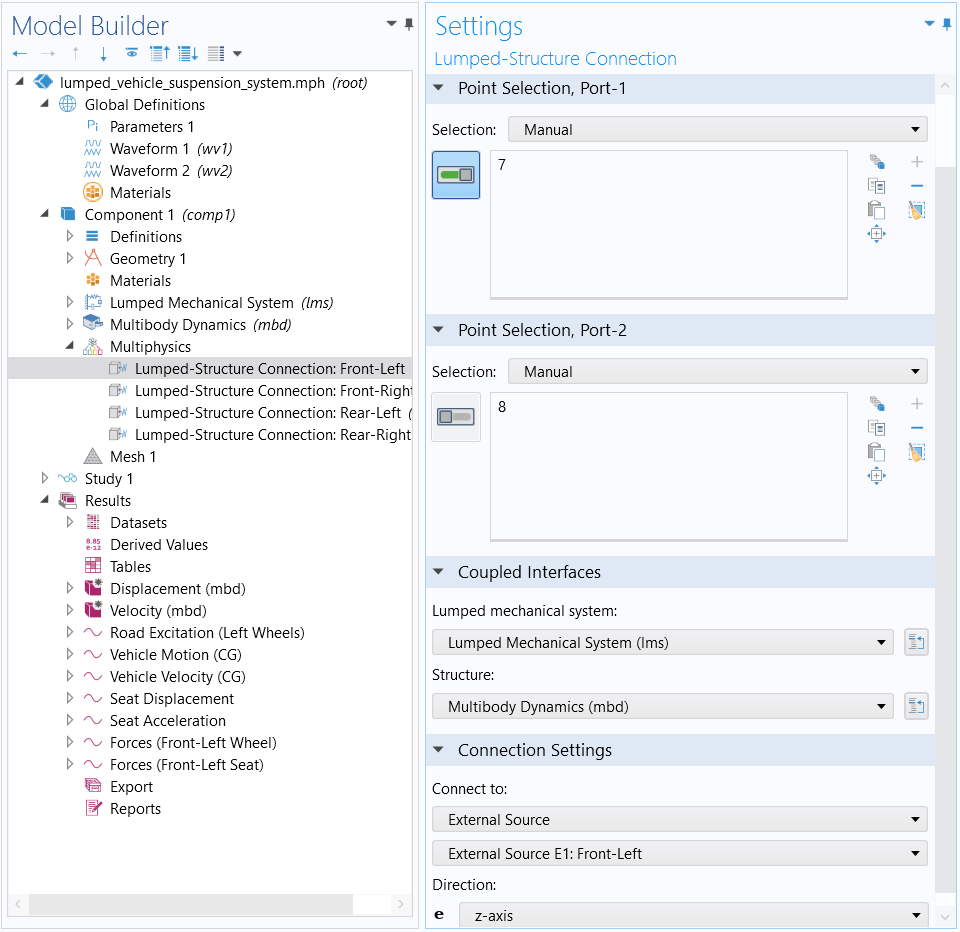
集中機械系インターフェースを使用してモデル化された集中系を, 任意の構造力学インターフェースを使用して構築された有限要素モデルに接続するために, 新しいマルチフィジックスカップリング集中構造接続が追加されました. 集中機械系インターフェースでの接続は, 有限要素コンポーネントに2つのポートがあるか, 1つのポートしかないかに応じて, 外部ソースノードまたは変位ノードのいずれかを使用して行うことができます. この機能は, 車両サスペンション系の集中モデルのチュートリアルモデル Lumped Model of a Vehicle Suspension System で使用されています.
{kind=link}
集中機械系モデリングの機能強化
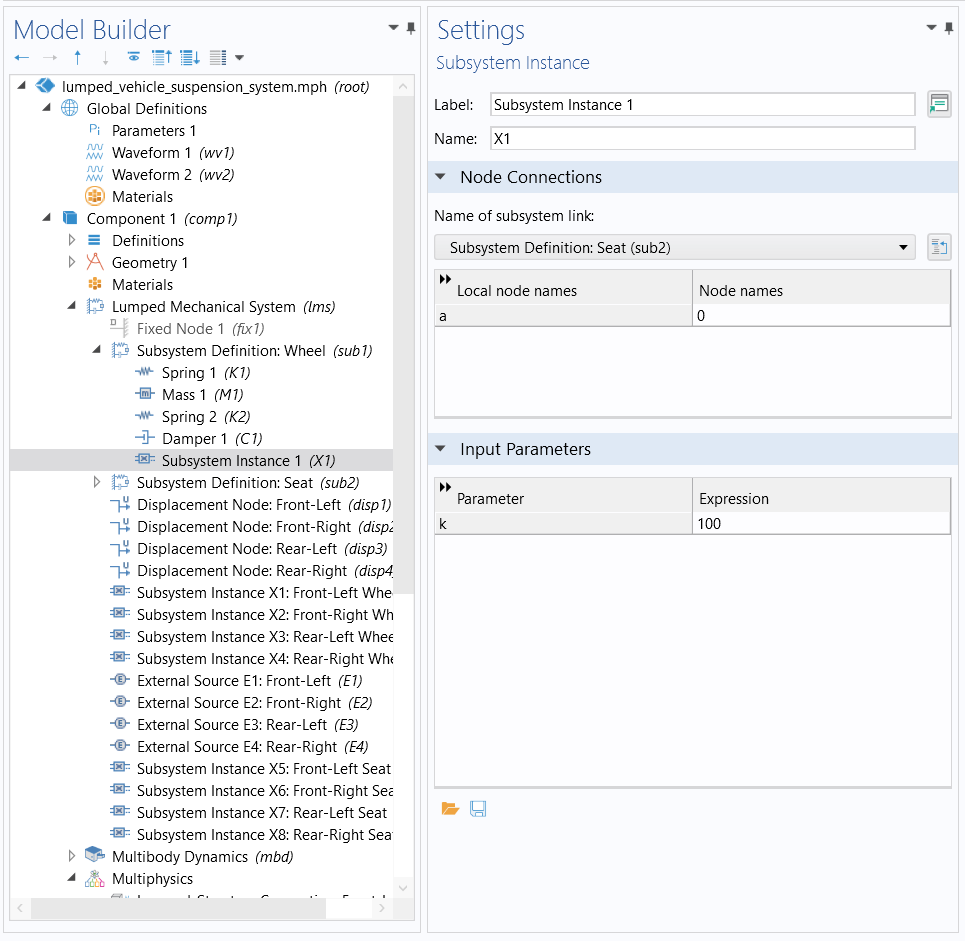
集中機械系のモデリング機能は, 多くの面で改善されています. ネスト化パラメトリックサブシステムが, 集中機械系でサポートされるようになりました. ネスト化サブシステムを使用すると, より複雑な系のモデル化が容易になり, パラメトリックサブシステムを使用すると, より汎用的なサブシステムモデルを作成できます. 新しい入力パラメーターセクションがサブシステム定義ノードとサブシステムインスタンスノードに追加されました. 複数のサブシステムインスタンスを, 同じモデル内の異なる入力パラメーターで使用できます.
{kind=link}
ジョイントの非線形ばね
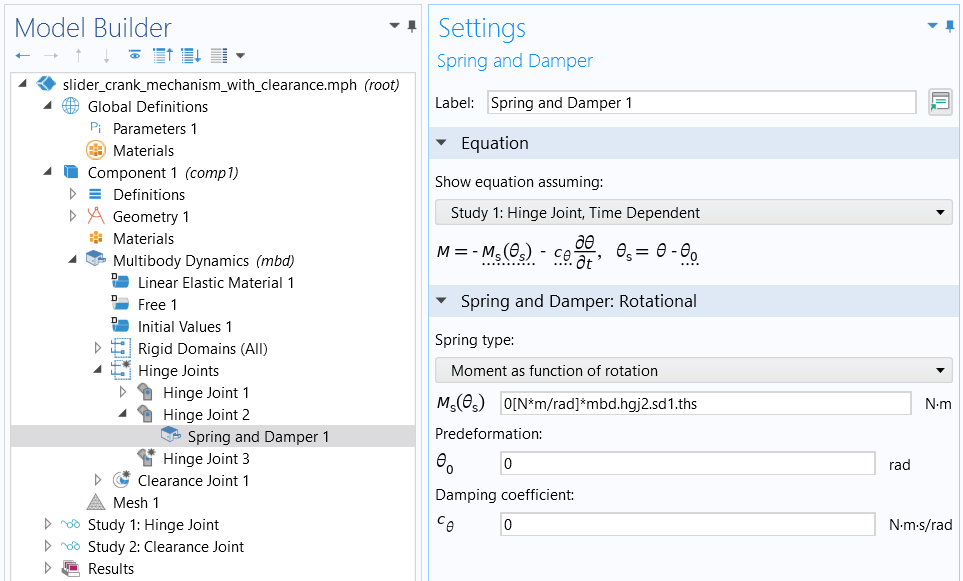
マルチボディダイナミクスインターフェースのすべてのジョイントノードのスプリングおよびダンパーサブノードに, 新しいスプリングタイプオプションが追加されました. ばねタイプオプションでは, ばね定数を指定する既存のオプションに加えて, 伸びの関数として力を指定できます. これを使用して, 伸びの関数としてばね力を書き込むことにより, ジョイントに取り付けられた非線形ばねをモデル化できます. 回転の自由度を持つジョイントでは, 代わりに回転の関数としてモーメントを指定できます.
{kind=link}
ジョイントの物理記号
マルチボディダイナミクスインターフェースで使用できるすべてのジョイントノードに, 物理記号のサポートが追加されました. 使用される物理記号は, ジョイントタイプごとに異なり, ジョイントの中央に配置されます. さらに, コネクターラインは, ジョイントセンターからすべてのソースセンターと行先センターに描画されます.
ダイナミック接触
ダイナミック接触の新しいアルゴリズムは, 過渡的な接触イベント中の運動量とエネルギーの保存を大幅に改善します. これは, 以前のバージョンよりも大幅に大きな時間ステップで, 過渡的な接触の問題を正確にモデル化できることを意味します. 新しい方法にアクセスするには, 接触ノードでペナルティのダイナミックまたは拡張ラグランジュのダイナミック定式化を選択します. この機能は Impact Between Two Soft Rings and Impact Analysis of a Golf Ball チュートリアルモデルで確認できます.
摩耗のシミュレーション
機械的摩耗をモデル化する方法が, 接触ノードの下のサブノードとして新しい摩耗ノードの中で追加されました. 固体力学およびマルチボディダイナミクスインターフェースで利用できます. 摩耗率は, 一般化された Archard 方程式に基づいています. 摩耗モデリングには2つのアルゴリズムがあります. 一般的な摩耗, および摩耗による任意の形状変化には, 変形形状アプローチが使用されます. 摩耗が接触ギャップのオフセットに組み込まれる単純化されたアプローチもあります. 新しい Disc Brake Pad Wear チュートリアルモデルで摩耗機能を確認できます.
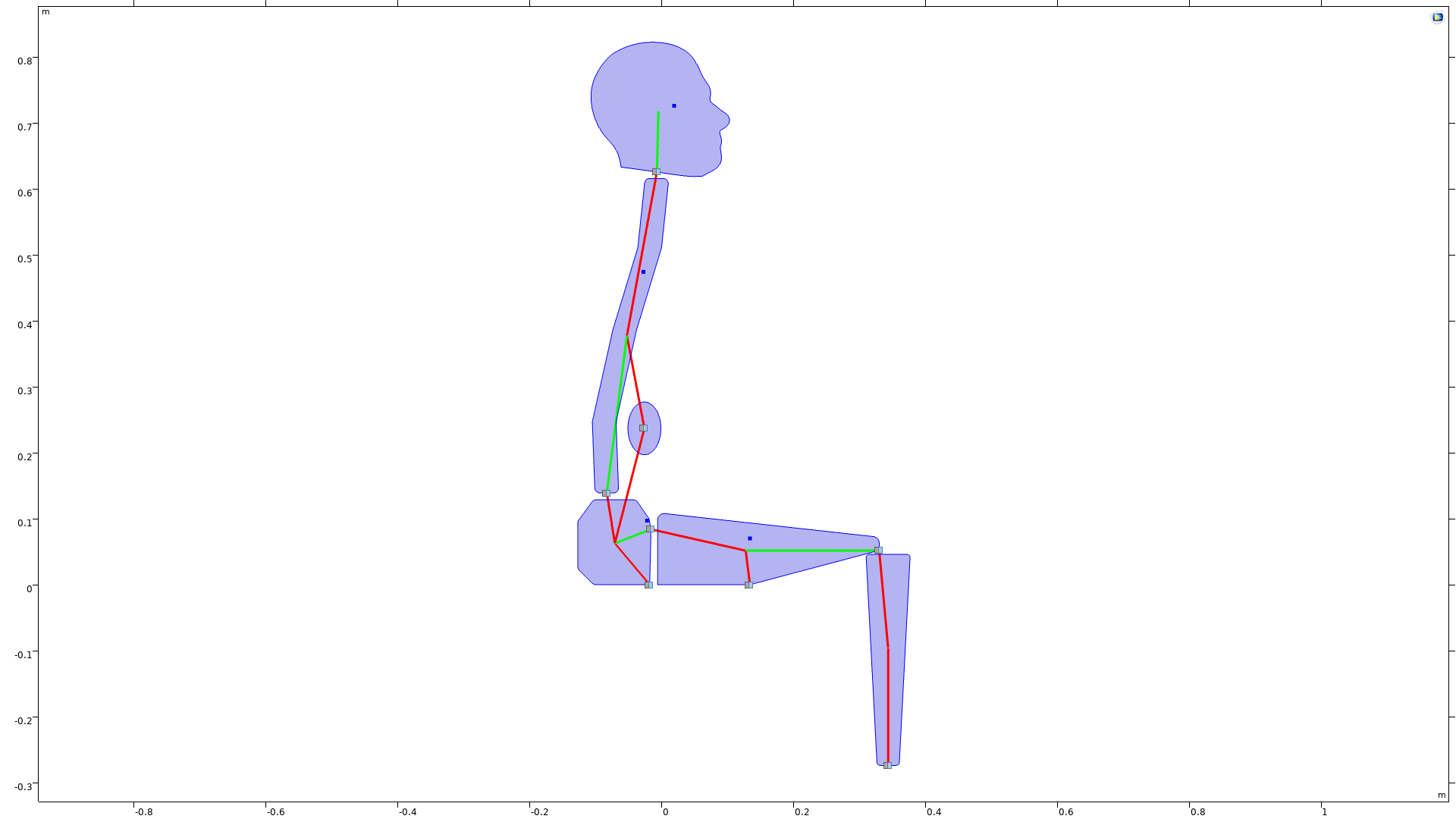
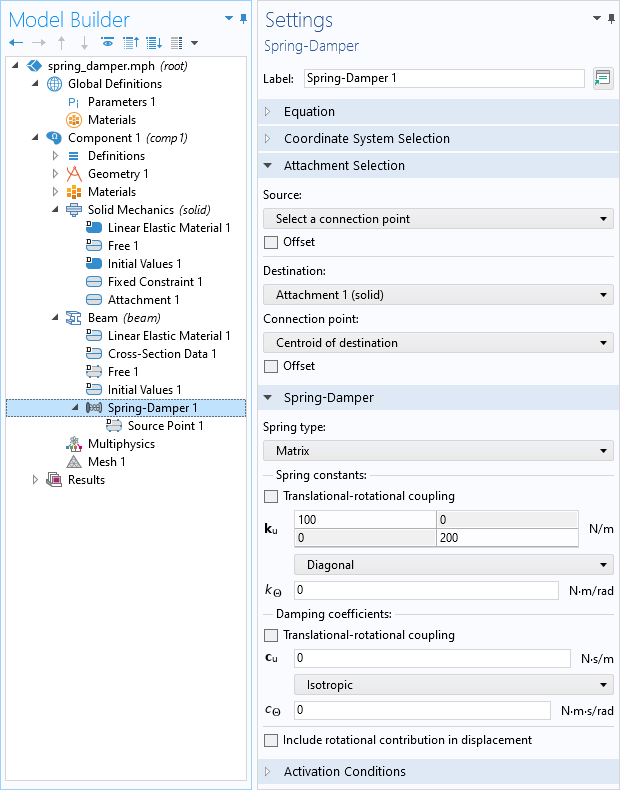
スプリングとダンパーの接続ポイント
すべての構造力学インターフェースで, スプリングダンパーと呼ばれる新機能が追加され, 2点をスプリングやダンパーで接続します. ポイントは幾何学的なポイントにすることができますが, たとえば, アタッチメントを使用したり, 剛体に直接接続したりすることで, 抽象的にすることもできます. ばねは, 2つの点の間の線に沿って力が作用する物理的なものか, 2つの点のすべての並進および回転の自由度を接続する完全なマトリックスによって記述されるもののいずれかです. この機能により, 2つの異なるフィジックスインターフェースのポイント間にスプリングを接続することもできます.
{kind=link}
剛体コネクターの改善
剛体コネクター機能で複数の改善があります. シェルと梁のインターフェースでは, 選択の選択肢がトップレベル, つまりそれぞれ境界とエッジに拡張されました. 回転の中心がポイントの選択によって定義されている場合, そのポイントはフィジックスインターフェース自体の一部である必要はありません. さまざまなフィジックスインターフェースの剛体コネクターを結合して, 新しいタイプの仮想剛体オブジェクトを定義できます (この選択は剛体コネクターの設定の詳細セクションにあります). 固体力学, シェルおよび梁インターフェースでは, NASTRAN® 形式でインポートされたファイルの RBE2 要素から剛体コネクターを自動的に生成できます. これは, これらのインターフェースの設定にある自動モデリングという名前のセクションから制御されます. インポートされたファイルの接続を模倣するために, 剛体コネクターは複数のフィジックスインターフェースに属することができます.
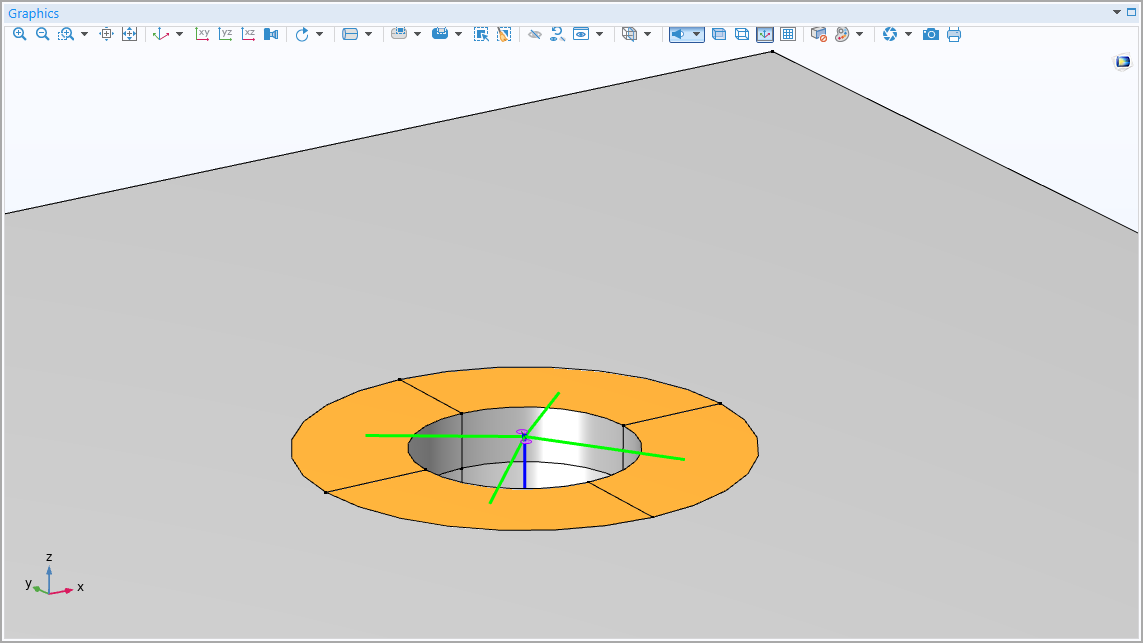
既知の滑り速度での摩擦
一部のアプリケーションでは, 2つのオブジェクトが特定の相対速度で互いにスライドするため, 摩擦力の方向がわかっています. この場合, 摩擦力を解く必要はありません. これにより, ソリューションを大幅にスピードアップできます. これらの場合には, 接触ノードの下にサブノードとして追加された新しいすべり速度機能を使用できます. このノードの入力は, 摩擦ノードの入力と同様です. この新機能は新しい Disc Brake Pad Wear モデルで確認できます.
回転座標系速度を規定するための新しいオプション
固体力学およびマルチボディダイナミクスインターフェースの回転座標系ノードに新しい剛体オプションが追加されました. このオプションを使用すると, 回転軸の周りに時間依存のトルクを入力し, 回転速度は剛体の運動方程式の積分によって計算されます.
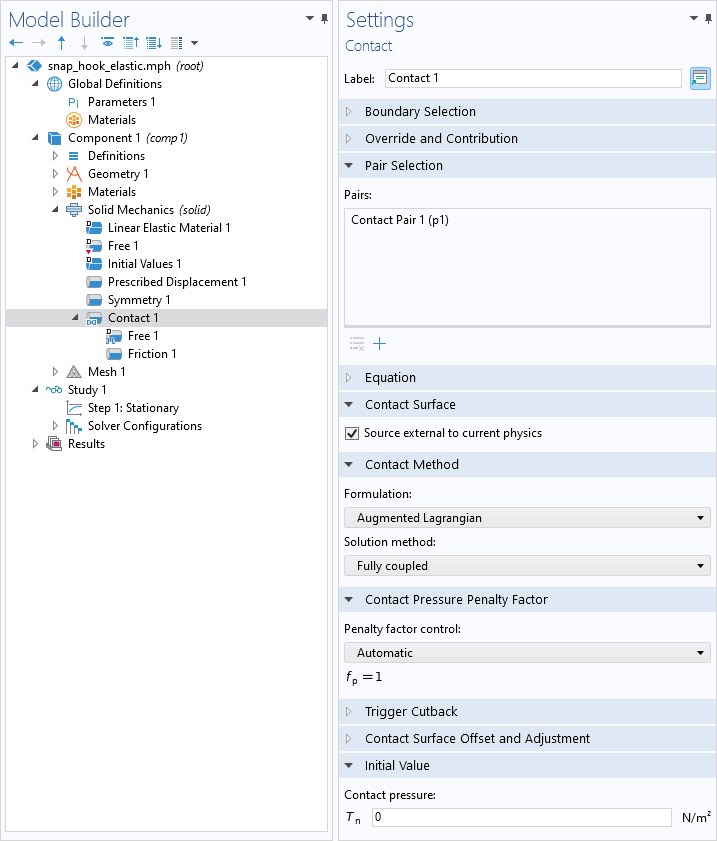
接触の改善
新しいダイナミック接触および摩耗機能に加えて, 接触力学の分野では他にもいくつかの改善があります. 完全連成されたソルバーを拡張ラグランジュ接触アルゴリズムと一緒に使用すると, ソルバーシーケンスの設定が簡単になり, 一部の問題の安定性と収束が向上します. また, 接触の下の摩擦サブノードで, 摩擦モデルとして定義されたユーザーを選択して, 他の変数に関してスライドを引き起こす接線力の式を直接入力できます. 最後に, ペナルティ法と拡張ラグランジュ法の両方に対して, ペナルティ係数を提供するいくつかの新しい方法があります.
{kind=link}
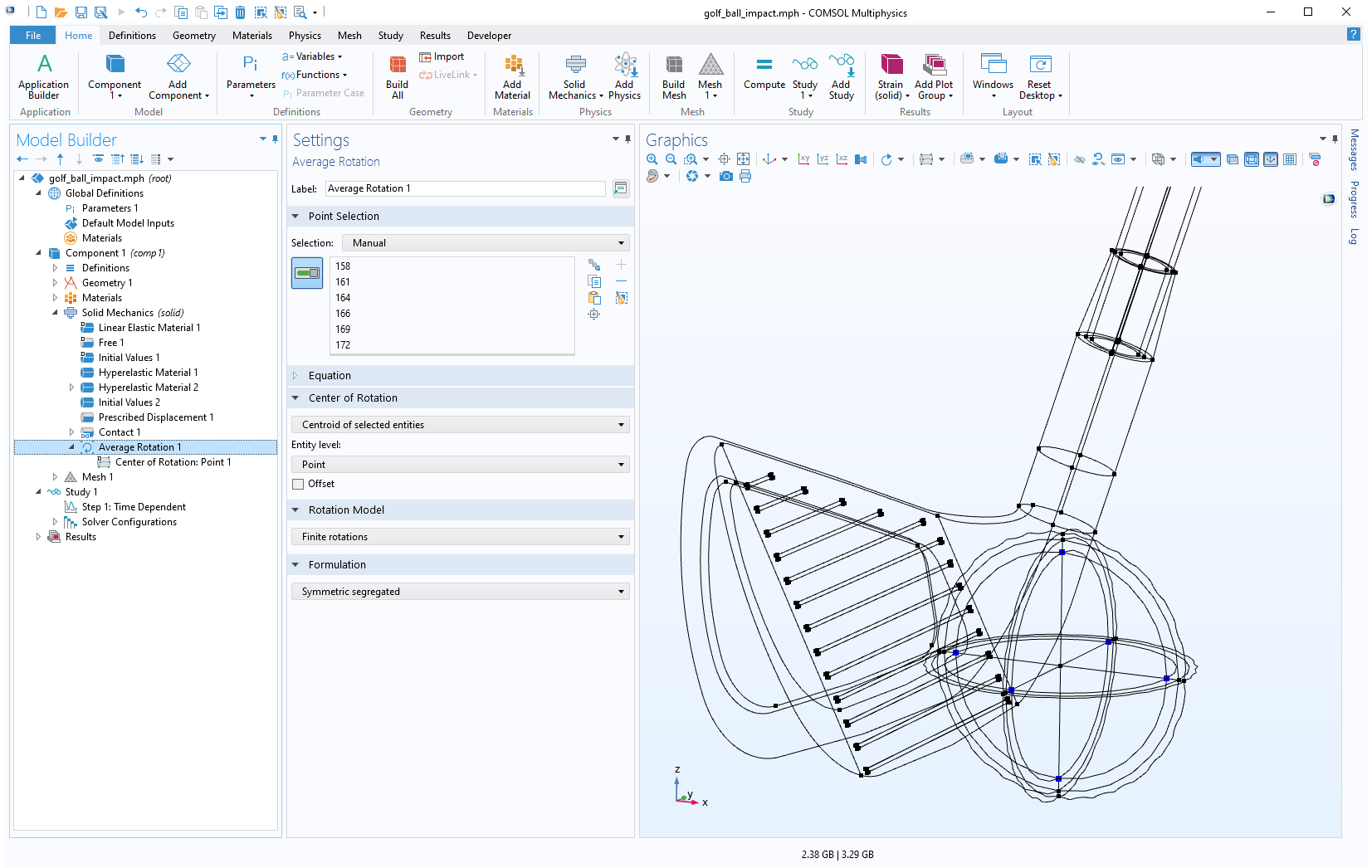
変位からの回転の計算
自由度として変位があるフィジックスインターフェースでは, 領域の回転を調べる必要がある場合があります. これを行うには, 新しい平均回転ノードを追加します. このノードは, 一 連のポイントの変位を使用して, 回転を表す変数を生成します. 3つを超える点が指定されている場合は, 最小二乗スキームを適用して, 点のセット全体の剛体回転を最適に近似します. さらに, 角速度と加速度を計算できます. この新機能は新しい Impact Analysis of a Golf Ball と, 更新された Sensitivity Analysis of a Truss Tower チュートリアルモデルで使われています.
新しいチュートリアルモデル
COMSOL Multiphysics® バージョン5.6では3つの新しいチュートリアルモデルがマルチボディダイナミクスモジュールに加わりました.
円筒ころ軸受のダイナミクス
アプリケーションライブラリタイトル:
roller_bearing_dynamics
ジョイントクリアランス付きスライダークランク機構
アプリケーションライブラリタイトル:
slider_crank_mechanism_with_clearance
ギアボックス内の振動と騒音のモデリング:軸受バージョン
アプリケーションライブラリタイトル:
gearbox_vibration_noise_bearing