剛体と柔軟体
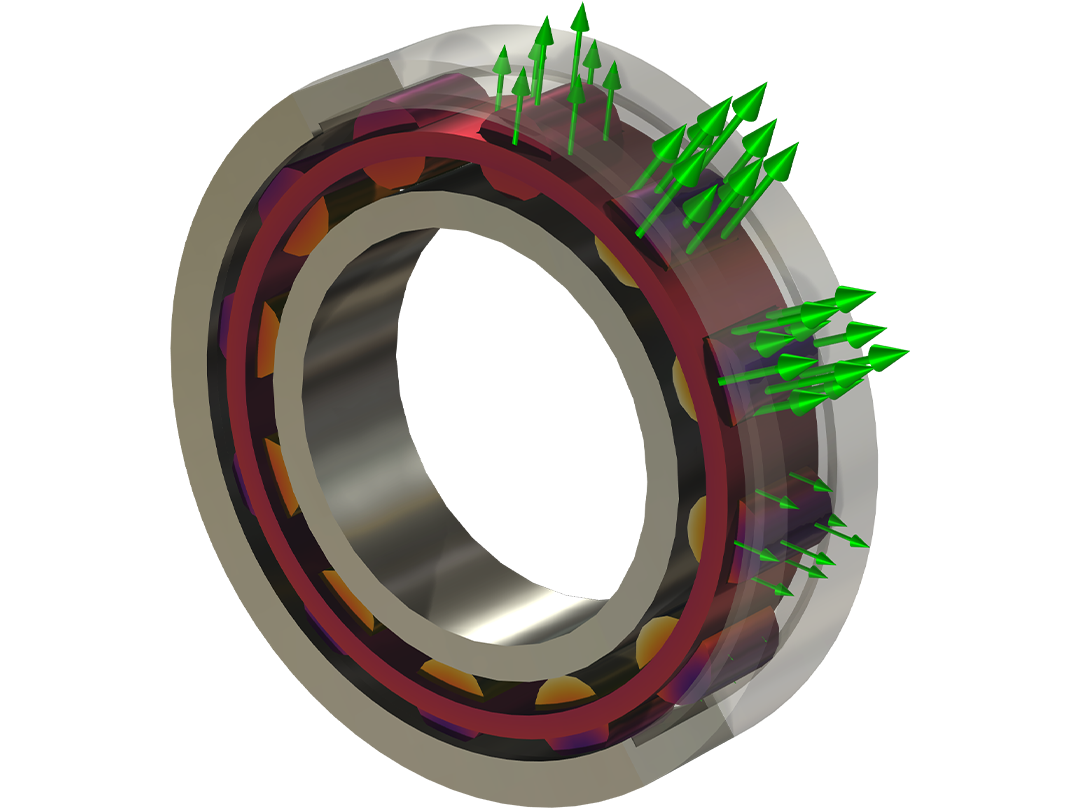
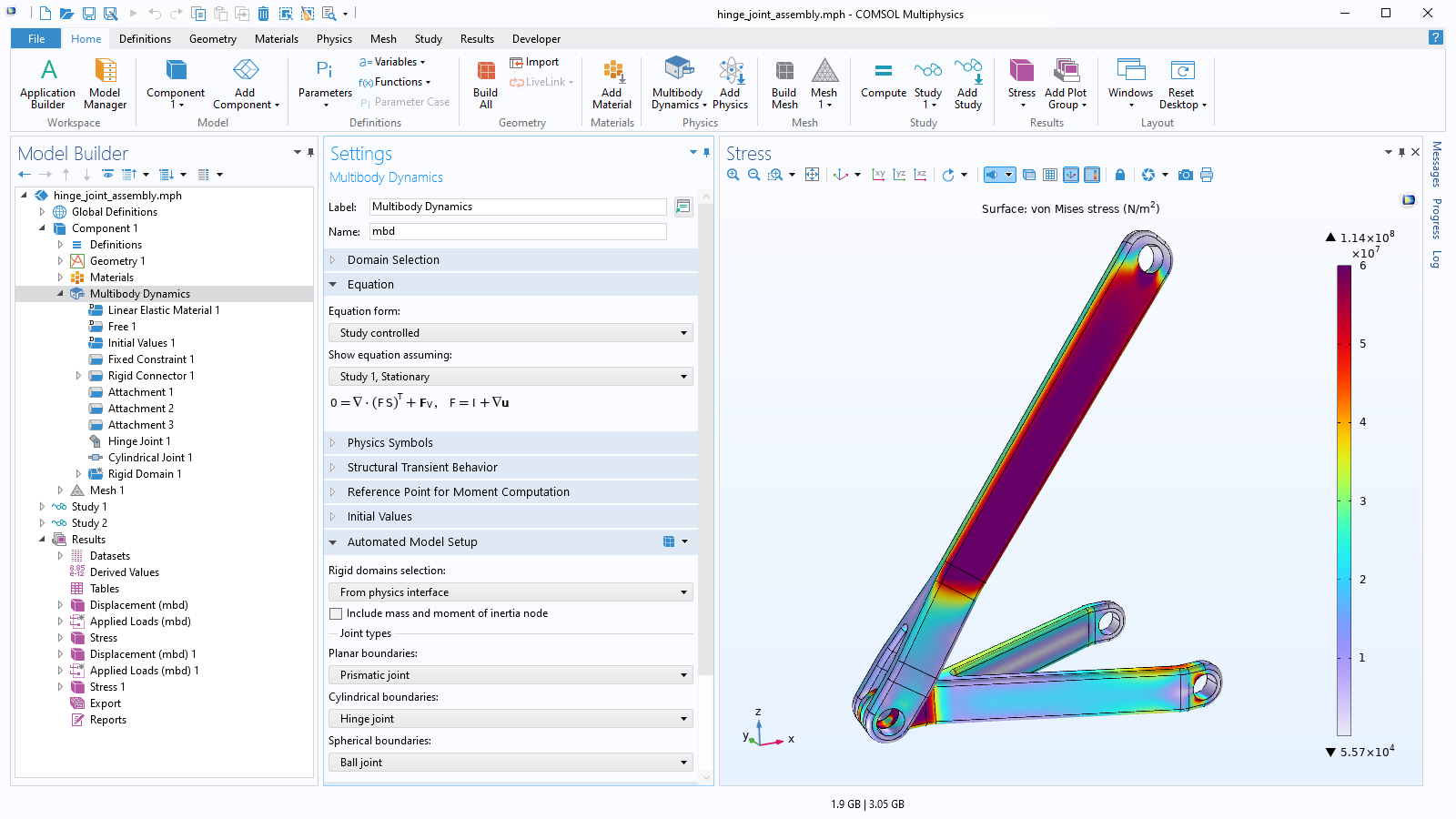
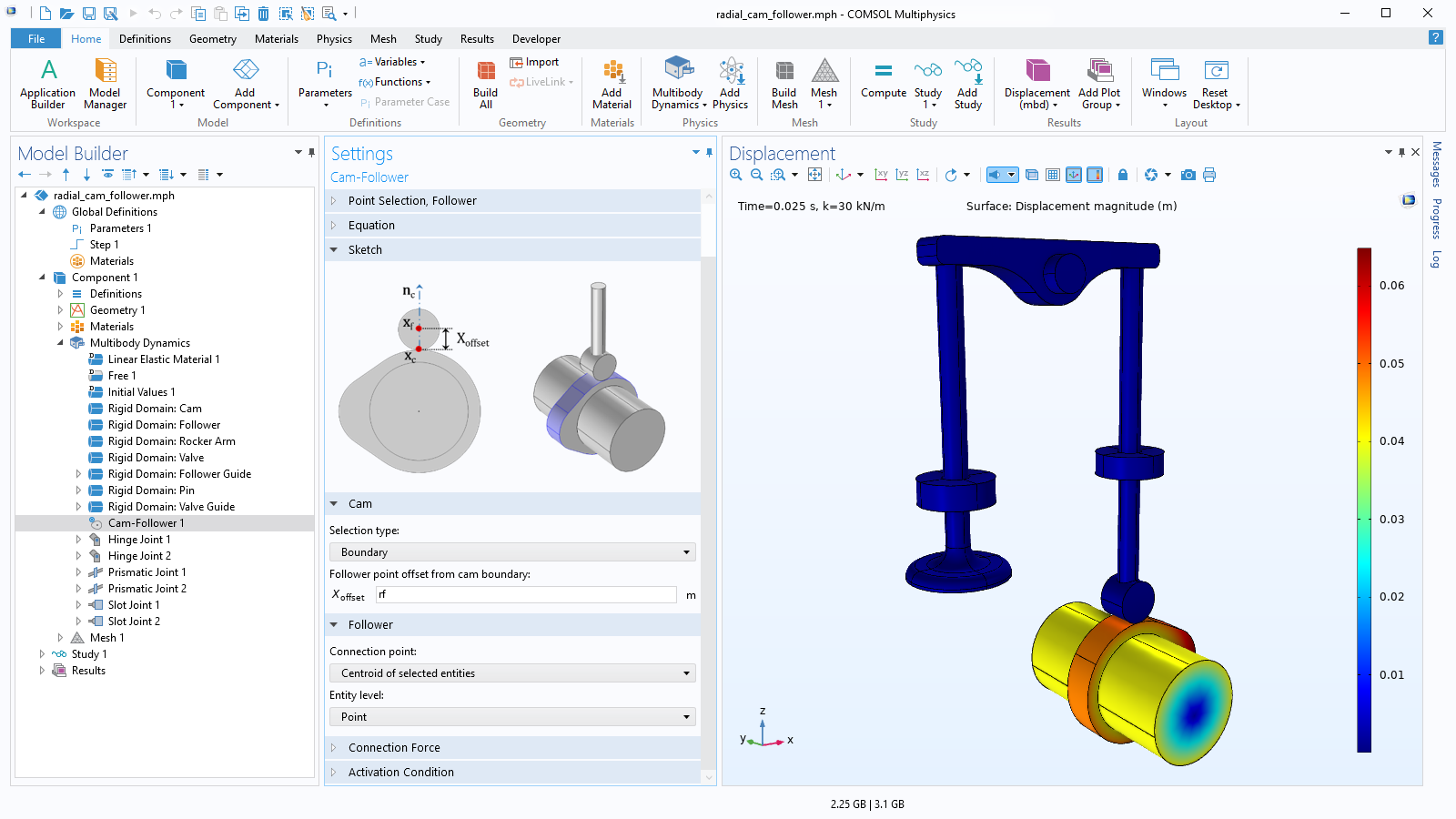
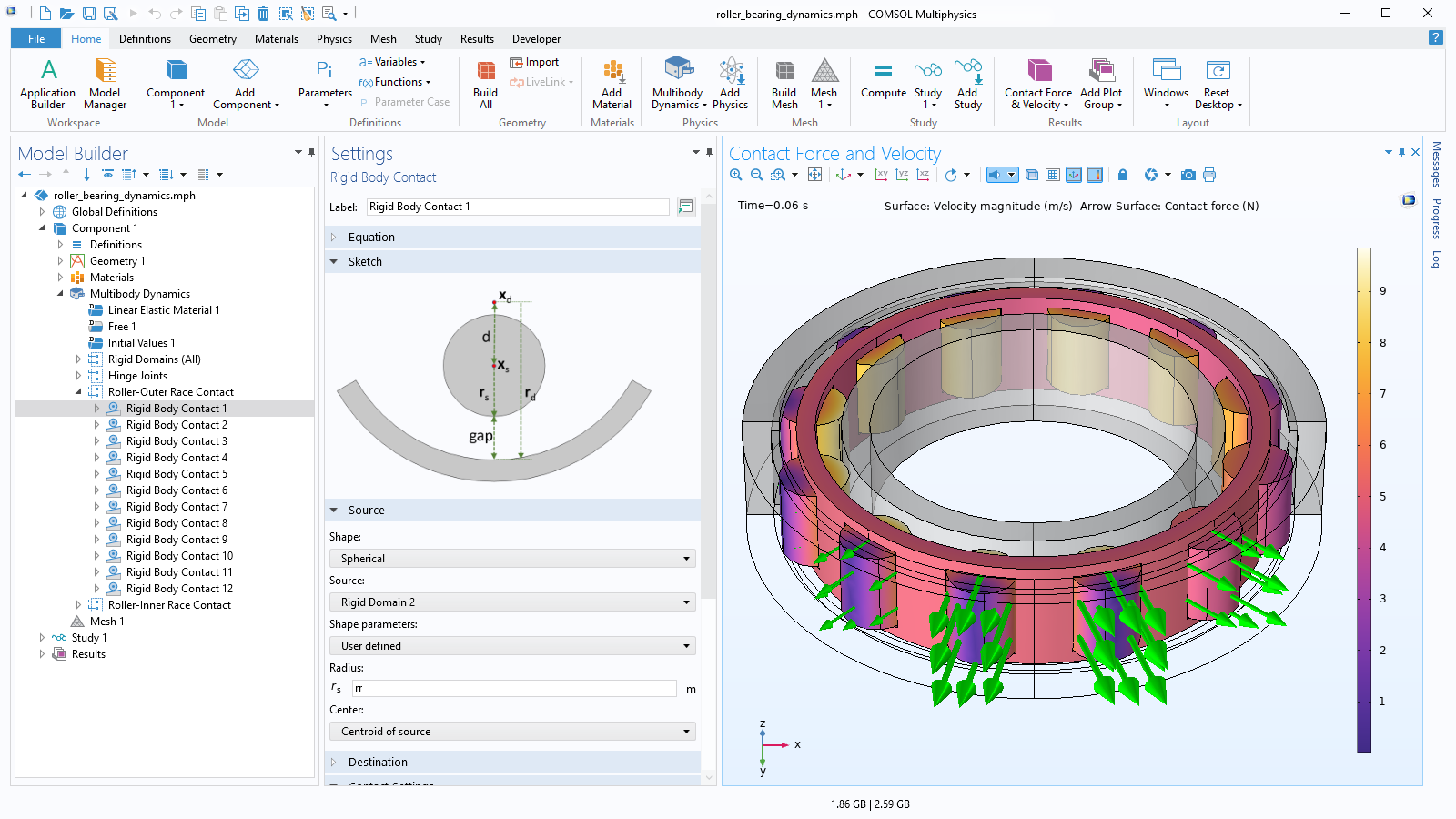
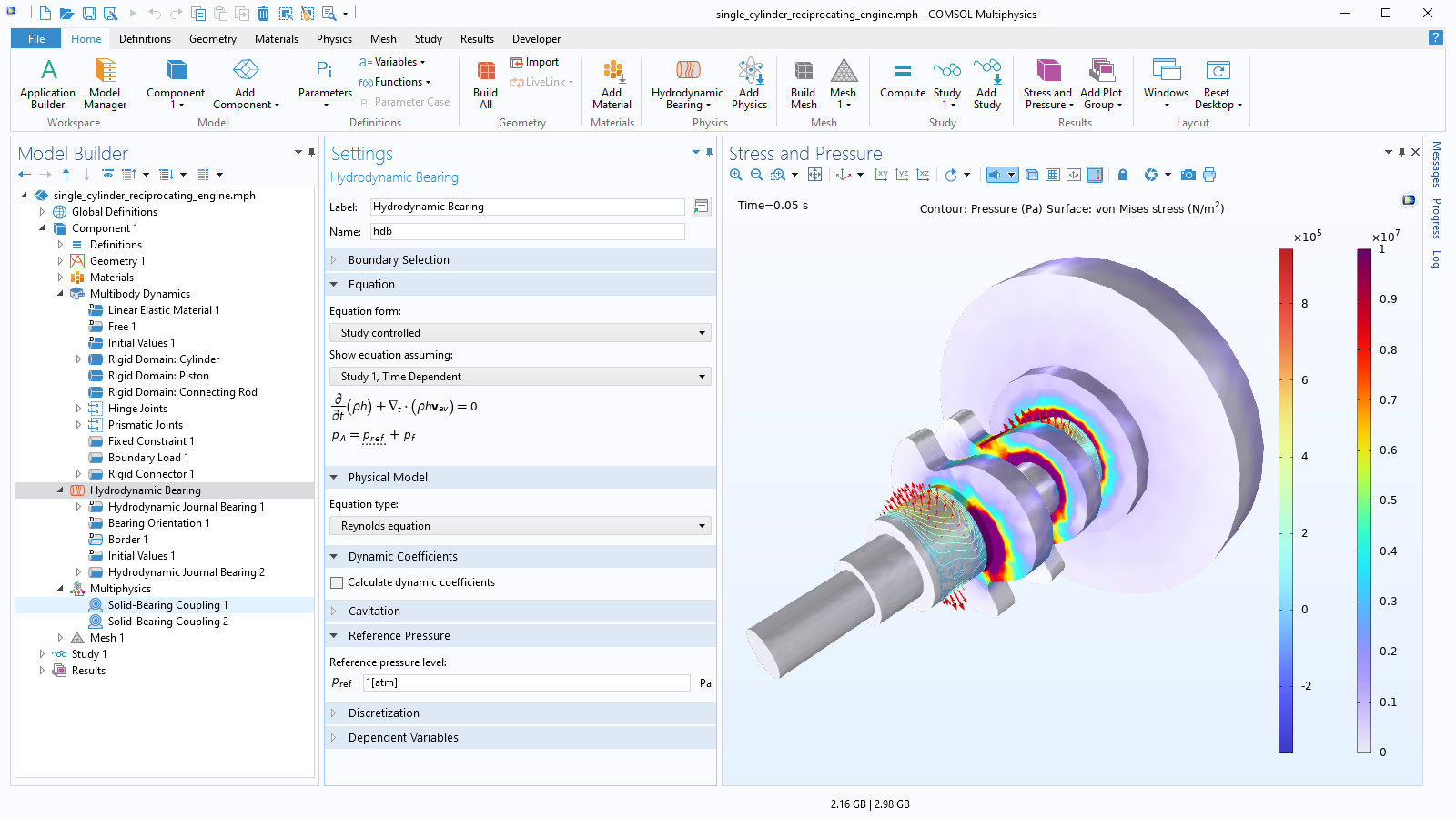
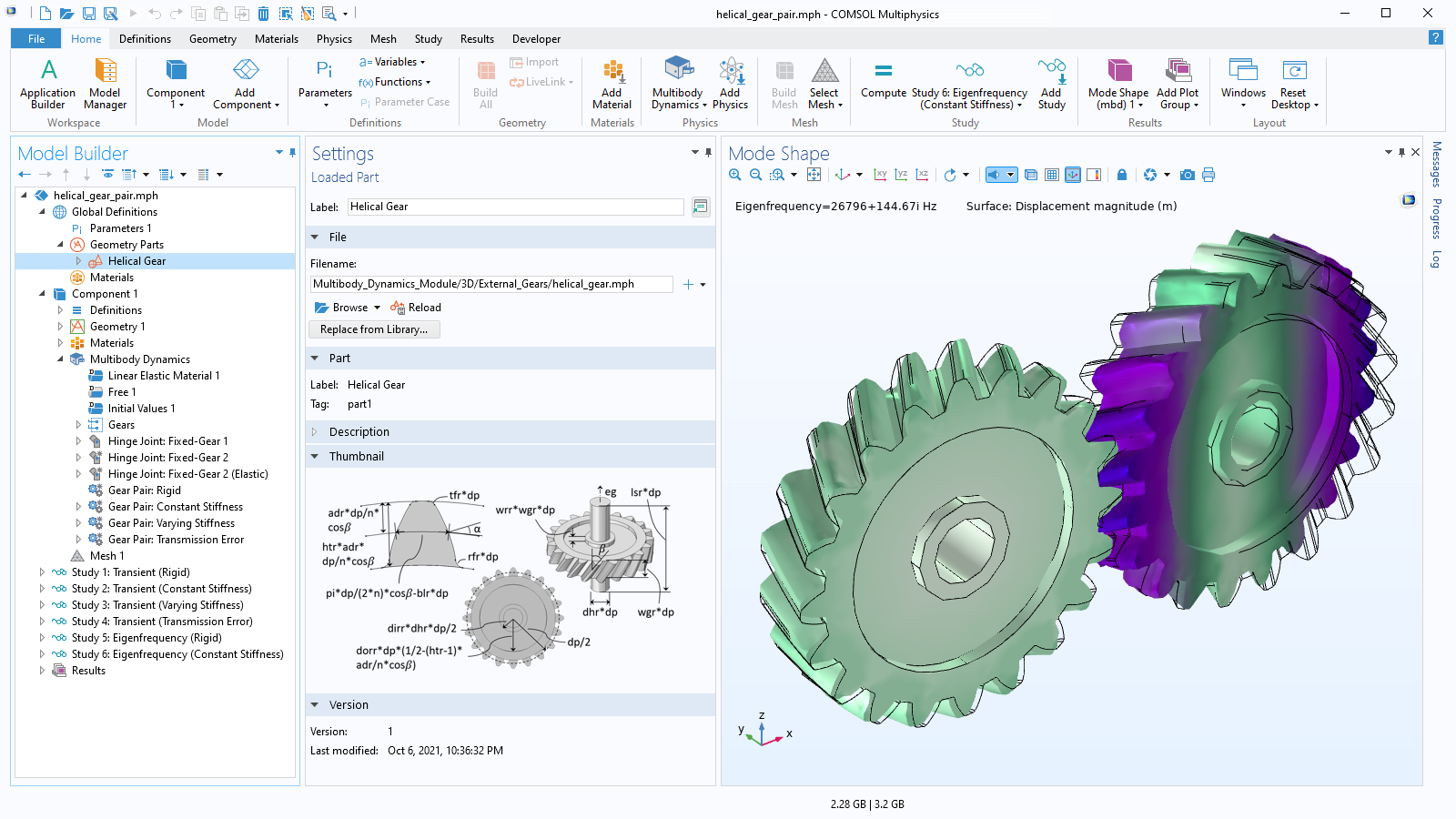
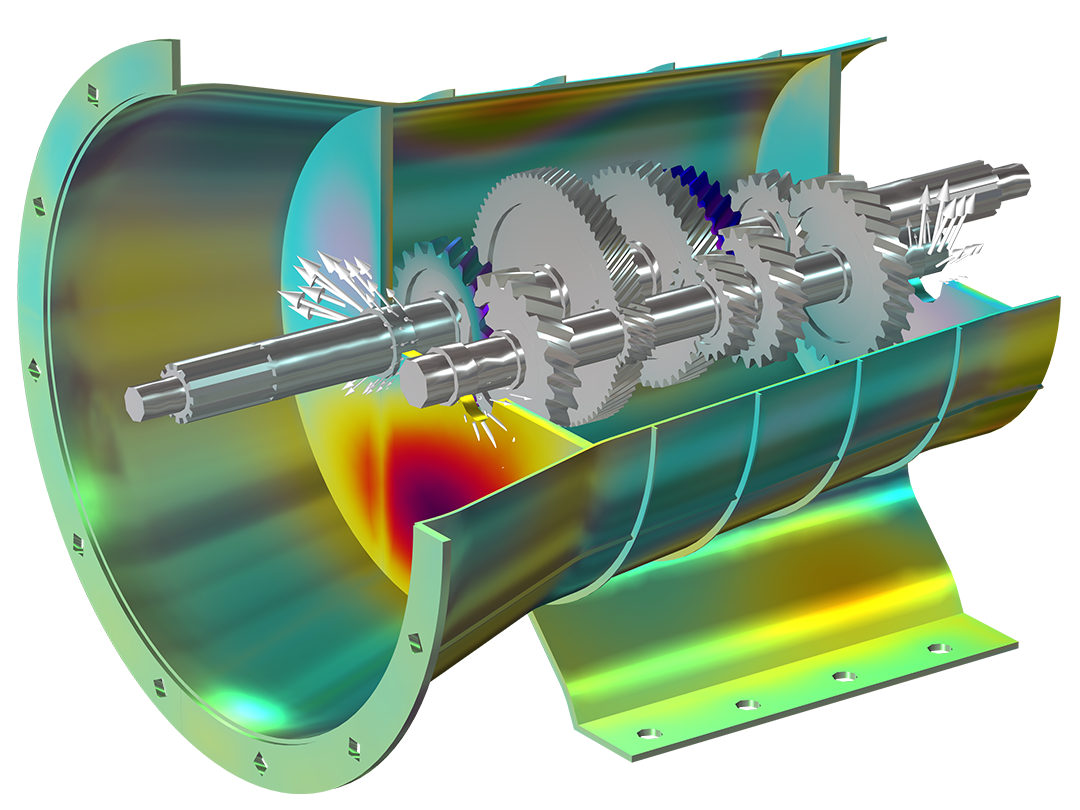
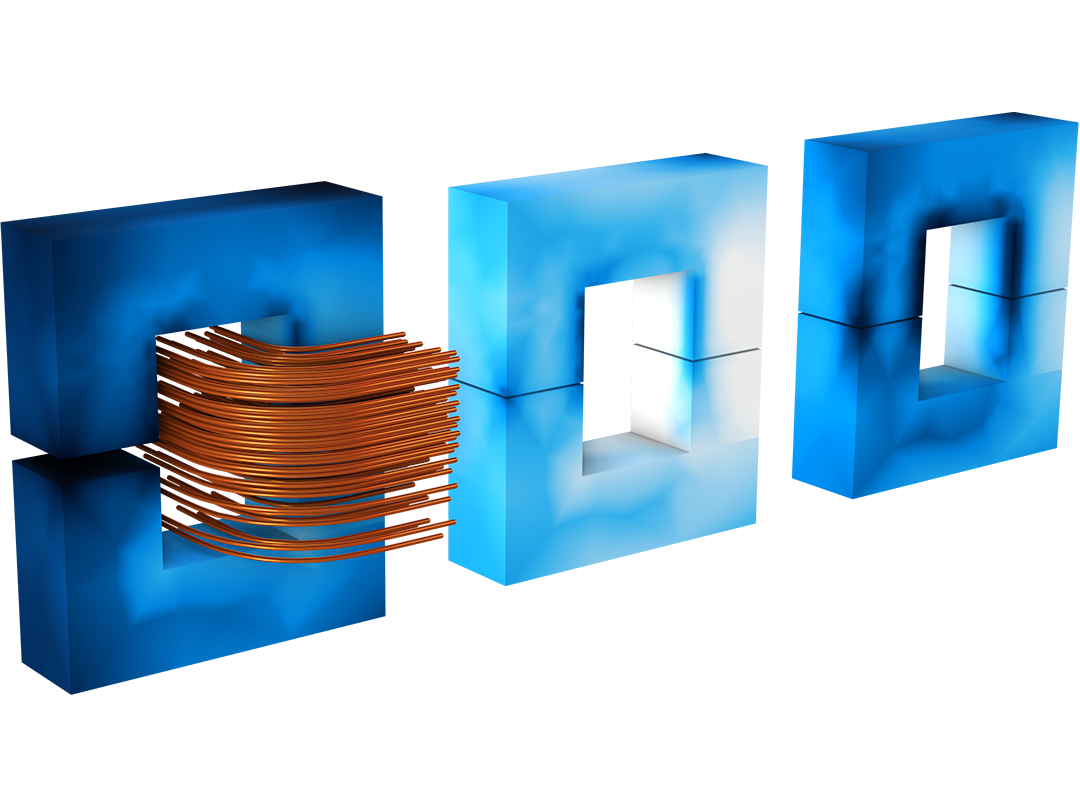
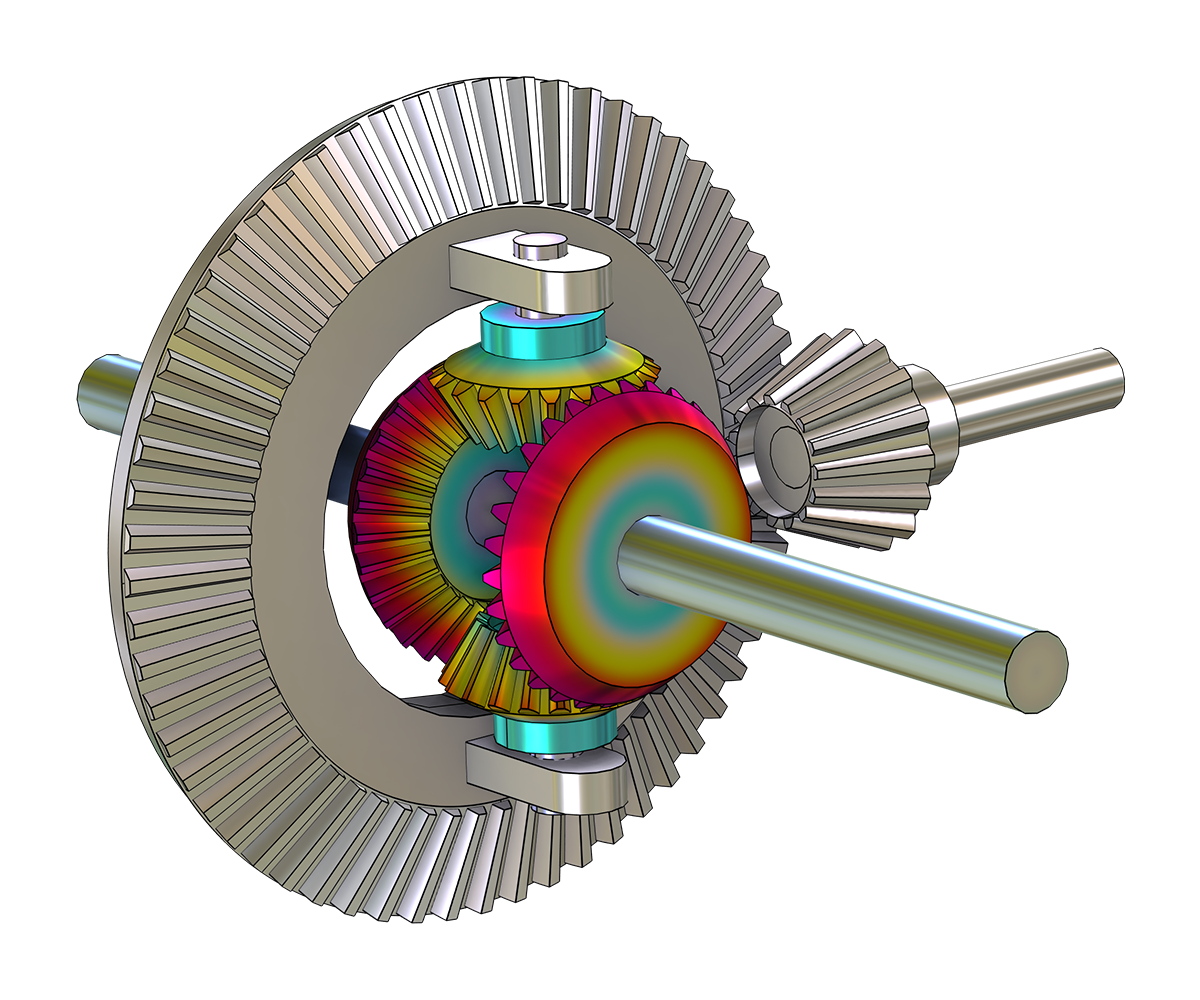
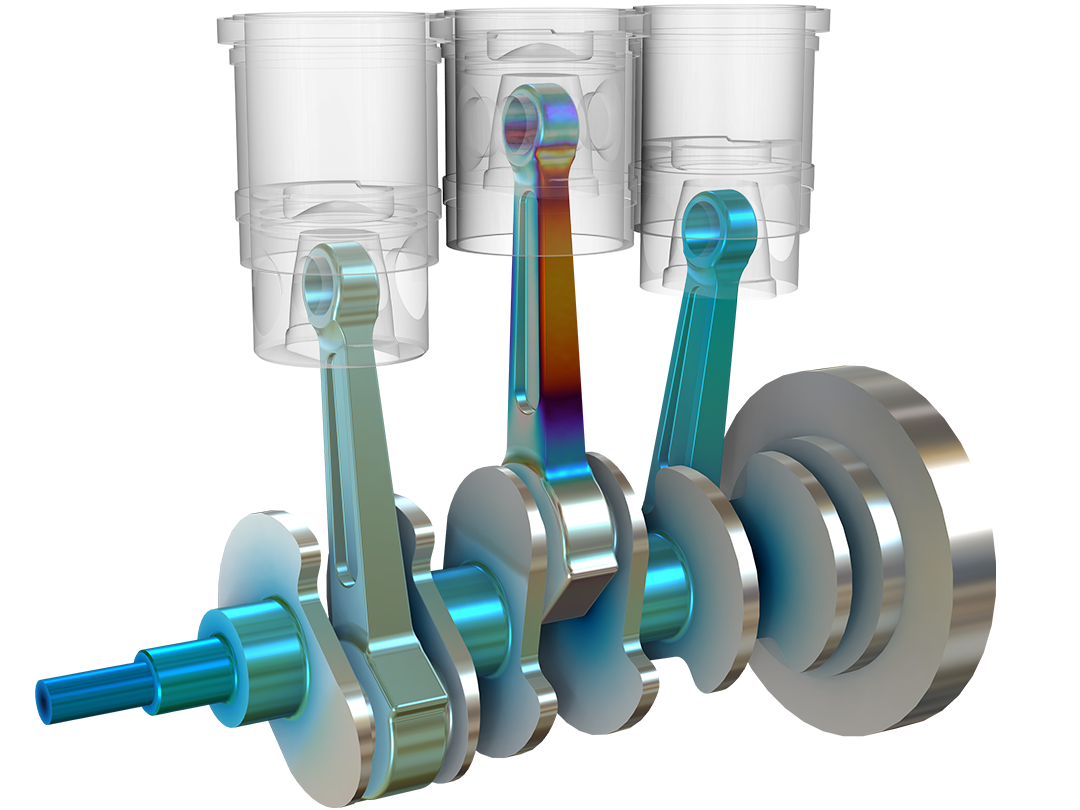
マルチボディシステムをモデリングする場合, 柔軟体と剛体は様々なタイプのジョイント, ギア, カム, 軸受, スプリング, ダンパーなどを使って接続され, 大きな変位や回転が与えられます. マルチボディダイナミクスモジュールを使用する利点の1つは, 剛体と柔軟なパーツを簡単に混ぜることができることです.
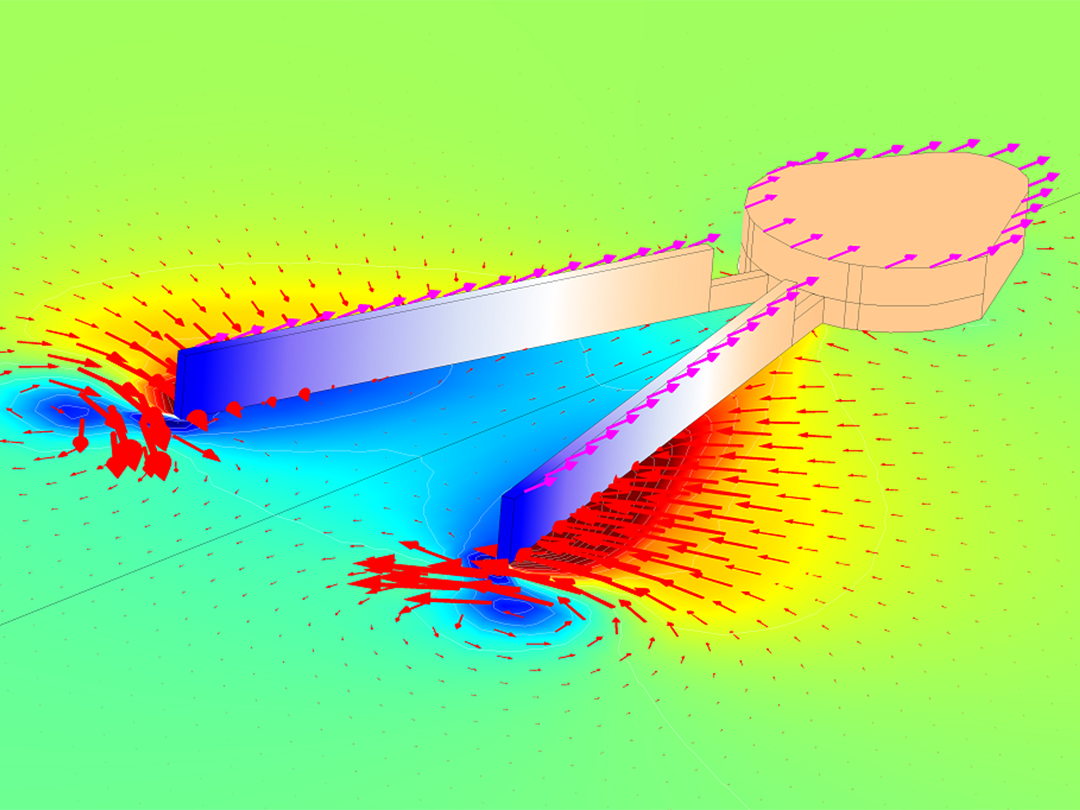
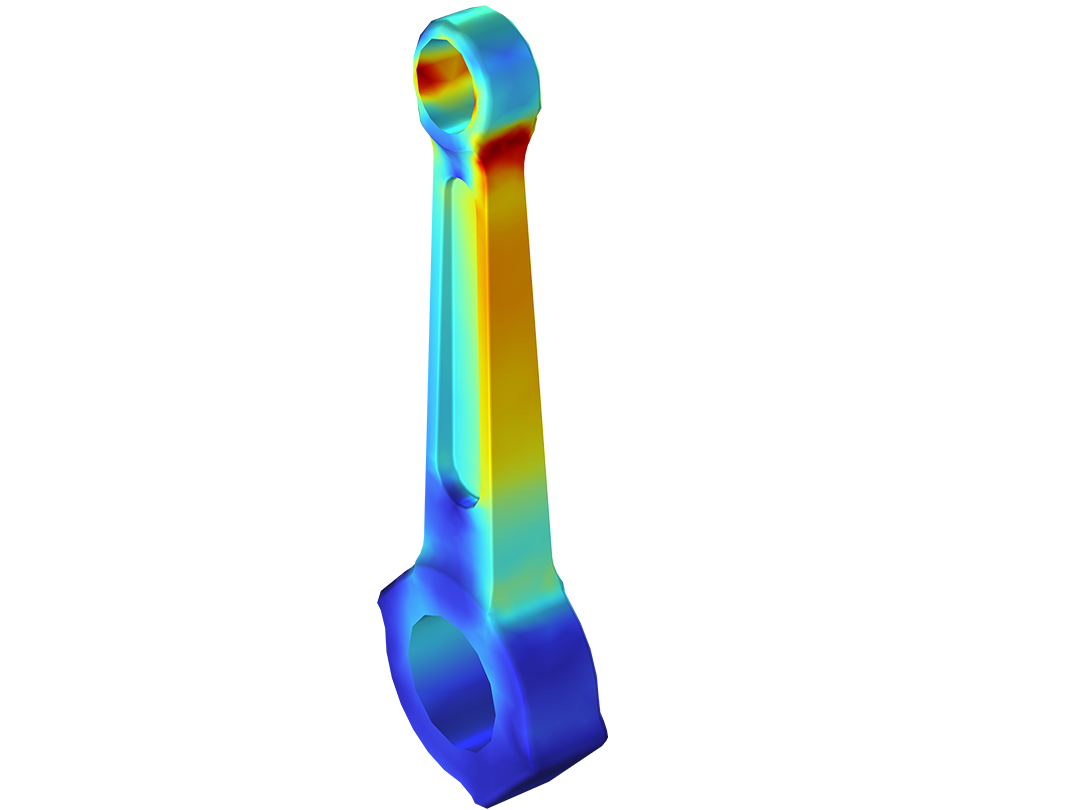
一般に, マルチボディシミュレーションの部品のすべてまたは大部分は剛体であるため, 剛体の自由度だけで表現されます. しかし, 時には1つまたはいくつかのパーツを柔軟体として表現したい場合があります. このモジュールで使用できる材料モデルを使用すれば, 剛体と柔軟性のある部品を選択的にモデルに割り当てることができ, 非線形材料の影響を含む詳細な構造解析を実行することができます. マルチボディダイナミクスモジュールは, 例えば, 構造物の剛性部品の接合部に発生する力や, 柔軟な部品に発生する応力を計算するのに使用できます.